





























User Manual of EL6-CAN AC Servo
www.leadshine.com
56
COB-ID description
Parallel to CAN, every node on a CANopen network must have a unique node-ID. The range of valid values
comprises from 1 to 127. Zero is not allowed.
Similarly, the priority is determined by the COB-ID and RTR bits. As expected, the RTR bit on the arbitration
field is used to request information from a remote node. In particular, it is used to implement the node guarding
and TPDO request features, explained in the following chapters. With the exception of these two
circumstances, the RTR bit is always set to zero.
The function cade determines the communication object, which should be one of the allowed in CANopen.
The final COB-ID od the object depends on the ID of which node receives or transits the message, which
allows to further establish priorities between nodes for the same function code.
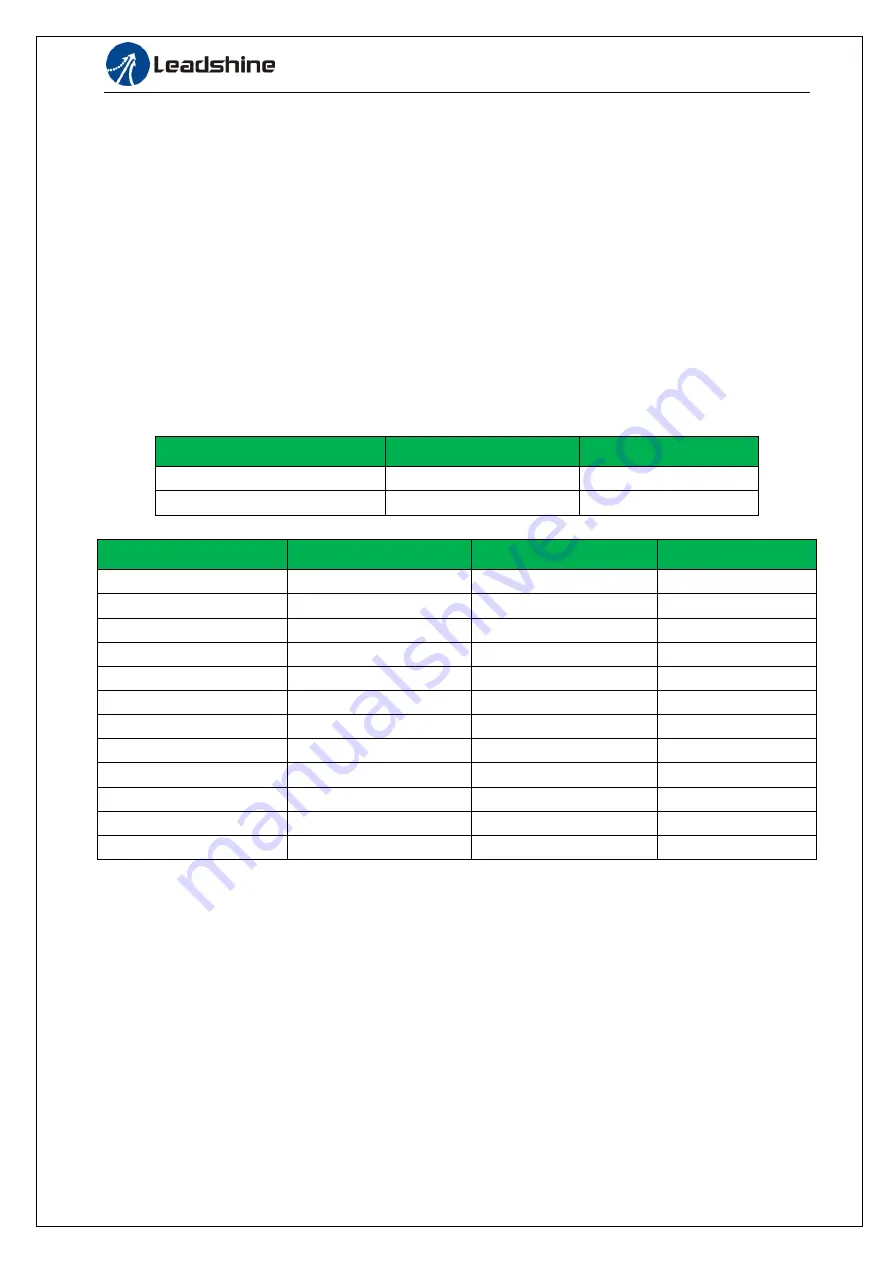
In a master/slave communication, the message could be divided into two groups, as shown in the following
tables.
CANopen broadcast messages:
Communication Object
Function code(binary)
COB-ID(hex)
NMT service
0000b
0x000
SYNC
0001b
0x080
CANopen peer-to-peer messages:
Communication Object
Function code(binary)
COB-ID(hex)
Object Dictionary
Emergency
0001b
0x080+Node-ID
1024H,1015H
TXPDO1(transmit)
0011b
0x180+Node-ID
1800H
RXPDO1(receive)
0100b
0x200+Node-ID
1400H
TXPDO2(transmit)
0101b
0x280+Node-ID
1801H
RXPDO2(receive)
0110b
0x300+Node-ID
1401H
TXPDO3(transmit)
0111b
0x380+Node-ID
1802H
RXPDO3(receive)
1000b
0x400+Node-ID
1402H
TXPDO4(transmit)
1001b
0x480+Node-ID
1803H
RXPDO4(receive)
1010b
0x500+Node-ID
1403H
SDO(transmit)
1011b
0x580+Node-ID
1200H
SDO(receive)
1100b
0x600+Node-ID
1200H
NMT error control
1110b
0x700+Node-ID
1016H~1017H
The COB-ID of No. 4 slave station TPDO2 = 0x280 + 4 = 0x284
5.2.2 CANopen objects
In the CANopen protocol, there are defined three main sets of objects, organized in profile areas:
Communication profile area (0x1000 to 0x1FFF)
: These objects relate to CANopen communication, as
defined in the DS301 communication profile. Objects in this address range are used to configure CANopen
messages, and for general CANopen network setting.
Manufacturer profile area (0x2000 to 0x5FFF)
: These objects are manufacturer specific. Detailed
information about the specific objects implemented in EMCL can be found all through this document.
Device profile area (0x6000 to 0x9FFF)
: These objects are standardized device profile objects as defined
in the DSP402 profile, which is the CANopen profile for servo drives.
This chapter is focused on the Communication profile area. DS301 defines special objects for the