





























—————— Instruction manual ——————
371
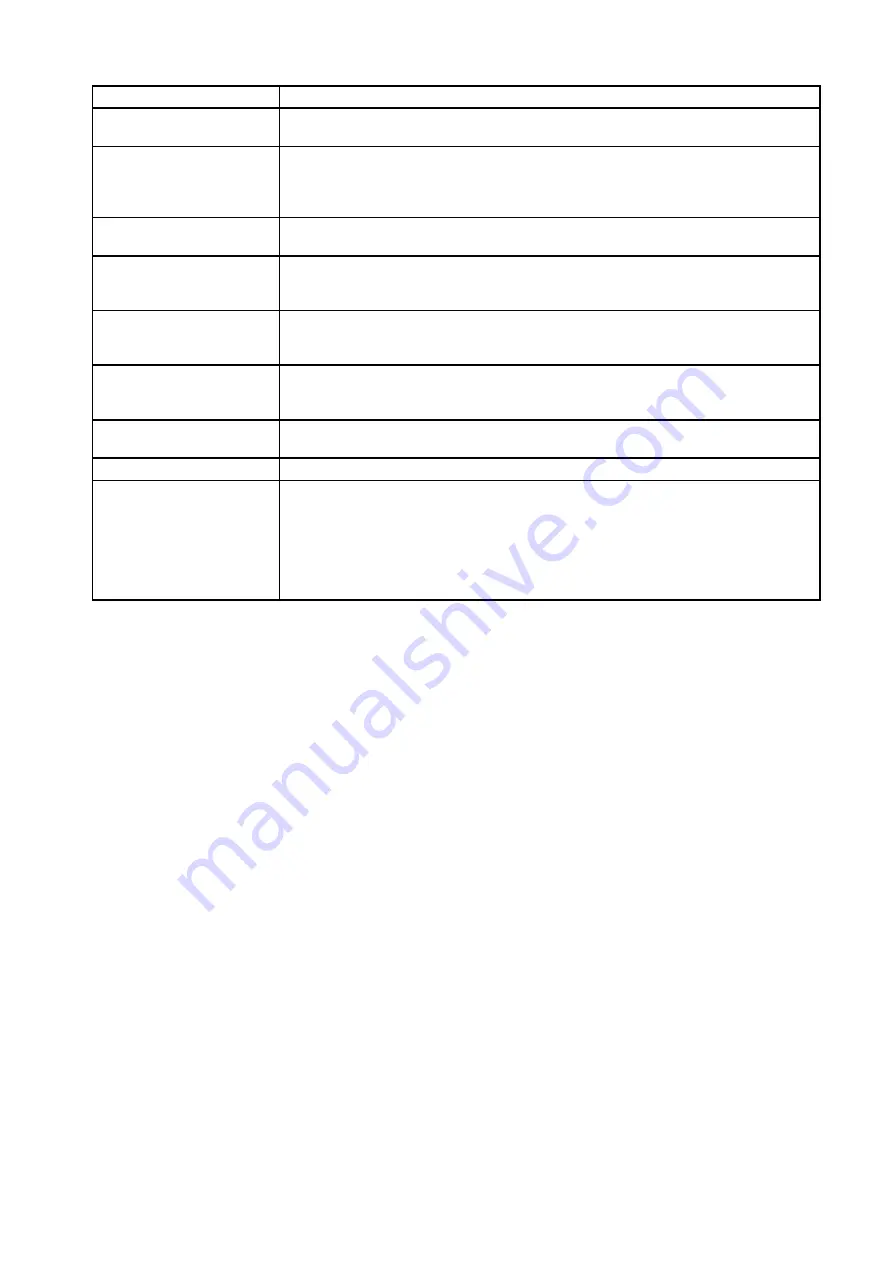
FAILURE
POSSIBLE CAUSES
The speed during acceleration
with max. current is not linear
• Reduce the
Speed I
and
Speed P
proportionally. If this does not lead to an improvement, optimize
the regulator (see chapter 5.3.6).
Speed oscillating
• Check
Speed P
and
Speed I
parameter
• If the operating point is in the field weak range, check the
Fld reg P gain
and
Fld reg I gain
parameters and eventually
Voltage P
and
Voltage I
parameters.
• Remedy: Optimize the regulator as previously described
Drive not reacting to adaptive
speed regulation
• Adaptive speed regulation not enabled.
Enable spd adap
= Enabled
Motor potentiometer function
not executed
• Function not enabled.
Enable motor pot
= Enabled
• With operation via the terminal strip:
Motor pot up
and/or
Motor pot down
were not assigned to
a digital input
Jog operation not possible
• A start command is still present
• Function not enabled.
Enable jog
= Enabled
• With operation via terminal strip:
Jog +
and/or
Jog -
were not assigned to a digital input.
Internal speed reference values
not carried out
• Function not enabled.
Enab multi spd
= Enabled
• With operation via terminal strip:
Speed sel 0, Speed sel 1
and
Speed sel 2
were not assigned
to a digital input.
Multi-Ramp function not
reacting
• Function not enabled.
Enab multi rmp
= Enabled
• With operation via terminal strip:
Ramp sel 0
and
Ramp sel 1
were not assigned to a digital input
Overload not possible
• Function not enabled.
Enable overload
= Enabled
The Current regulator selftune
procedure never finishes and
continues over and over again.
• Because of the motor inductance value, the routine is executing an endless loop. The inductance
value is cycling between two values without an evolution of the
algorithm.
• Solution procedure:
1) verify the two displayed inductance values
2) insert the average value as motor inductance during the autotuning.
If the procedure does not end, repeat step 1) and 2).
Содержание TPD32-EV-...-2B
Страница 1: ... Instruction manual Industrial Application DC drives TPD32 EV ...
Страница 62: ... TPD32 EV 62 10 mm 0 4 150 mm 6 150 mm 6 150 mm 6 10 mm 0 4 10 mm 0 4 50 mm 2 Figure 3 3 2 Mounting Clearance ...
Страница 372: ... TPD32 EV 372 9 BLOCK DIAGRAM 9 1 CONTROL BLOCK DIAGRAMS ...
Страница 373: ... Instruction manual 373 ...
Страница 374: ... TPD32 EV 374 ...
Страница 375: ... Instruction manual 375 ...
Страница 376: ... TPD32 EV 376 ...
Страница 377: ... Instruction manual 377 ...
Страница 378: ... TPD32 EV 378 ...
Страница 379: ... Instruction manual 379 ...
Страница 380: ... TPD32 EV 380 ...
Страница 381: ... Instruction manual 381 ...
Страница 382: ... TPD32 EV 382 ...
Страница 383: ... Instruction manual 383 ...
Страница 384: ... TPD32 EV 384 ...
Страница 385: ... Instruction manual 385 ...
Страница 386: ... TPD32 EV 386 ...
Страница 387: ... Instruction manual 387 ...
Страница 388: ... TPD32 EV 388 ...
Страница 389: ... Instruction manual 389 ...
Страница 390: ... TPD32 EV 390 ...
Страница 391: ... Instruction manual 391 ...
Страница 392: ... TPD32 EV 392 ...
Страница 393: ... Instruction manual 393 ...
Страница 394: ... TPD32 EV 394 ...
Страница 395: ... Instruction manual 395 ...
Страница 396: ... TPD32 EV 396 ...
Страница 397: ... Instruction manual 397 ...
Страница 398: ... TPD32 EV 398 ...
Страница 399: ... Instruction manual 399 ...
Страница 400: ... TPD32 EV 400 ...
Страница 401: ... Instruction manual 401 ...
Страница 402: ... TPD32 EV 402 ...
Страница 501: ... Instruction manual 501 APPENDIX 3 ACCESSORIES A3 1 EAM Adapter Kit EAM1579 EAM1580 ...
Страница 503: ......