























4th edition, 9-11-2018
7000.05050, 4th edition, 9-11-2018
7000.05050
Overview
9
2.2
Pre-conditions for communication
FAULHABER drives are delivered in the unconfigured state. For operation in a CAN net-
work, a unique node number must be assigned and a Baud rate set at commissioning (see
chap. 5, p. 40).
After switching on and initialising, the Motion Controller is at first in the
Pre-Operational
state. In order to be able to perform drive functions, the Motion Controller must be
brought into the
Operational
state (see chap. 3.8, p. 27).
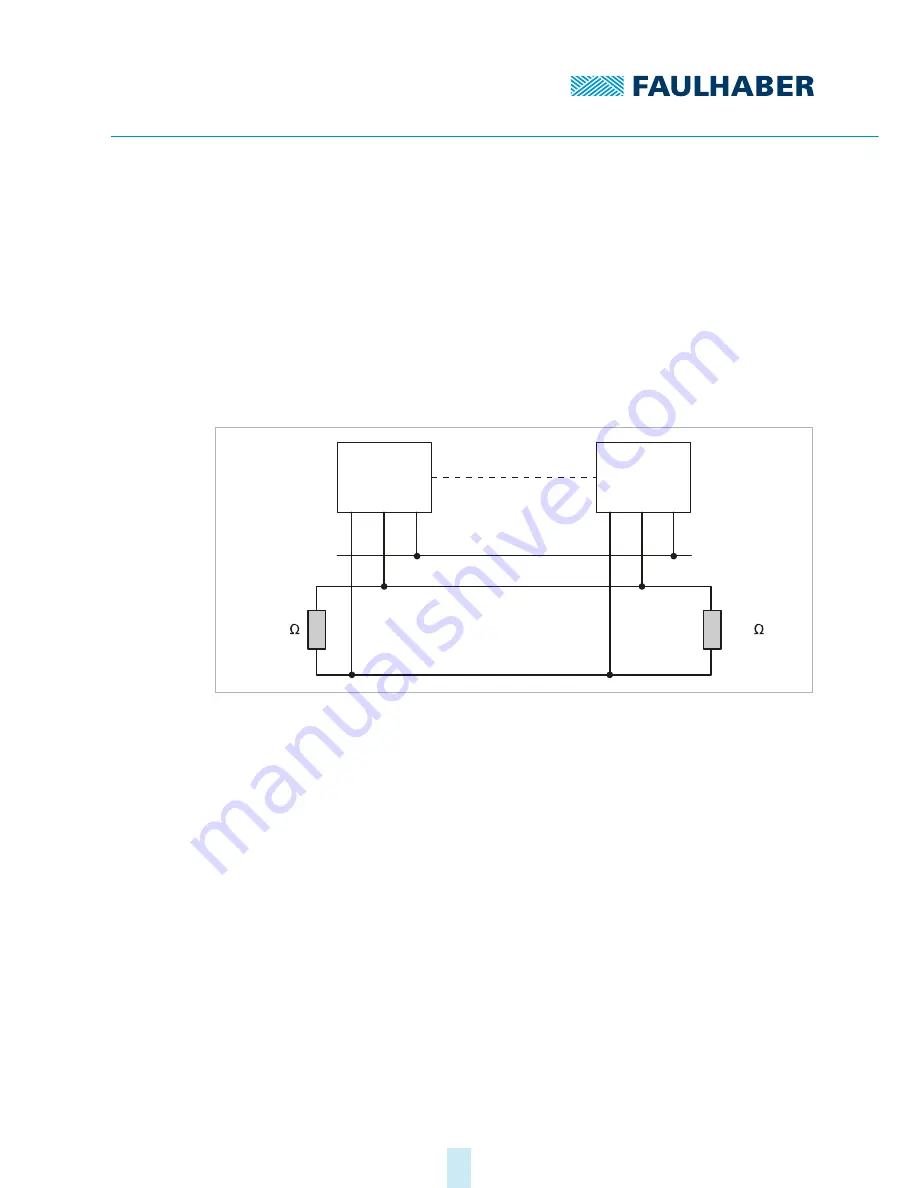
1. Connect the controller to a power supply (supply at least to the electronics).
2. Connect CAN_H, CAN_L, GND to the respective terminals of a host-side CAN connection.
3. Switch on the power and establish a connection via the configuration application.
Fig. 2:
Connection to the CANopen network
2.3
FAULHABER Motion Manager
We recommend that the first commissioning of a FAULHABER drive is performed using
“FAULHABER Motion Manager“ software.
The FAULHABER Motion Manager permits simple access to the settings and parameters of
the connected motor controller. The graphical user interface allows configurations to be
read, changed and reloaded. Individual commands or complete parameter sets and pro-
gram sequences can be input and loaded to the controller.
Wizard functions support the user when commissioning the drive controllers. The wizard
functions are arranged on the user interface in the sequence they are normally used:
Connection wizard: Supports the user when establishing the connection to the con-
nected controller
Motor wizard: Supports the user when configuring an external controller to the con-
nected motor, by selecting the respective FAULHABER motor
Control setting wizard: Supports the user in optimising the control parameters.
The software can be downloaded free of charge from the FAULHABER Internet page.
Node 1
CAN Bus Line
Node n
GND
CAN_H
CAN_L
120
120