





























70
SI-EtherCAT User Guide
Issue Number: 2
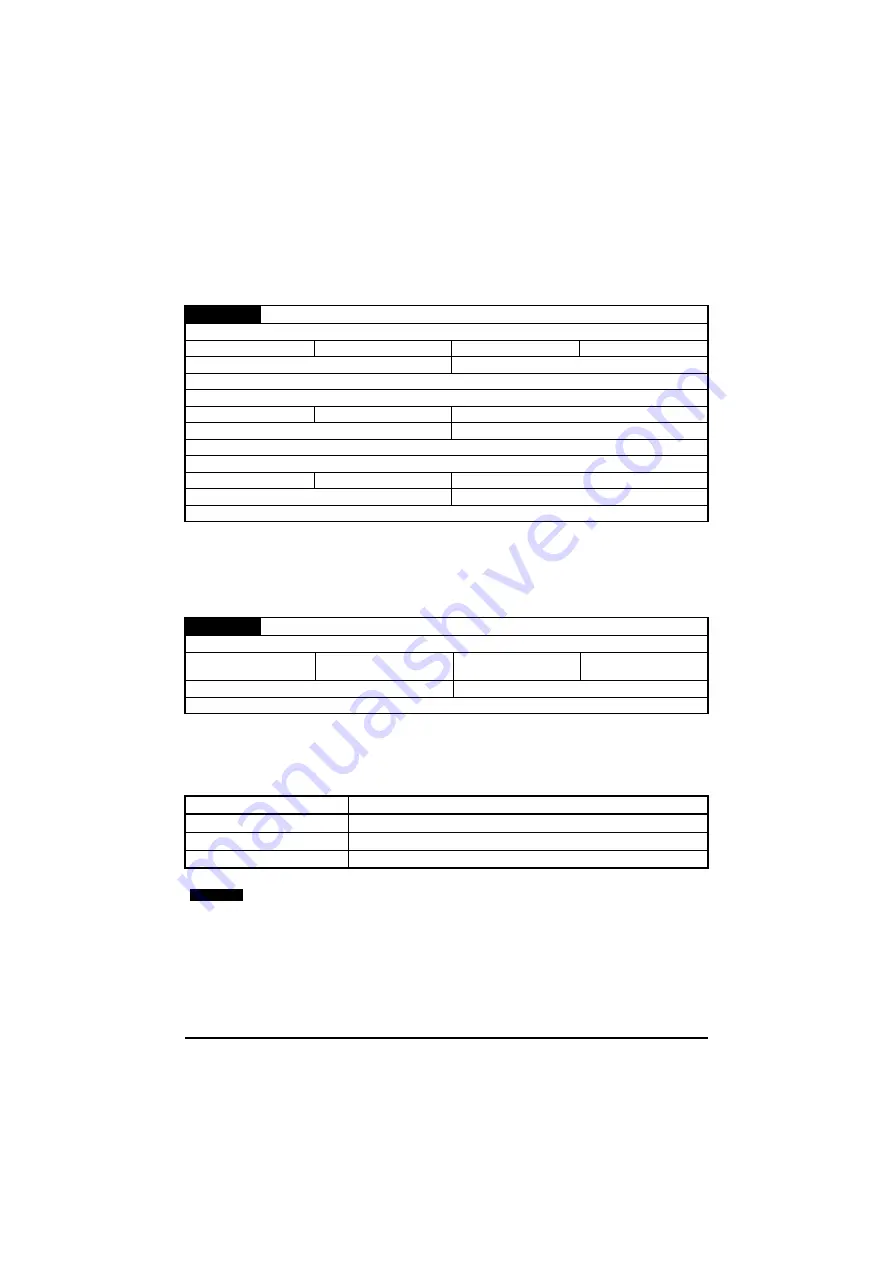
0x6099 Homing speeds
This object indicates the configured speeds used during the homing procedure. The values shall be
given in user-defined velocity units. Table 7-58
on page 70 specifies the object
description.
Table 7-58 Homing speeds
0x609A Homing acceleration
This object indicates the configured acceleration and deceleration to be used during the homing
operation. The value shall be given in user-defined acceleration units. Table 7-59
on page 70 specifies the object description.
Table 7-59 Homing acceleration
7.7
Cyclic sync position mode
Cyclic sync position mode is supported on the Unidrive M600 and above in RFC-A and RFC-S
modes. It is not supported in open-loop or regen mode.
Table 7-60 Cyclic sync position mode
Cyclic sync position mode provides linear interpolation which will always insert a delay of one
position command. The time specified must always be an integer multiple of the control loop cycle
time. The time period index has a minimum value of -6 (i.e. the smallest time unit will be
microseconds). The time period is checked to ensure that it an integer multiple of the control loop
cycle time.
0x6099
Homing speeds
Sub-index 0
Access: RO
Range: 2
Size: Signed 8
Unit: N/A
Default: 2
Type:
USINT
Description: The number of the last sub-index in this object.
Sub-index 1
Access: RW
Range: 0 to 0xFFFFFFFF
Size: Unsigned 32
Unit: N/A
Default: 0
Type:
UDINT
Description: Speed during search for a switch.
Sub-index 2
Access: RW
Range: 0 to 0xFFFFFFFF
Size: Unsigned 32
Unit: N/A
Default: 0
Type:
UDINT
Description: Speed during search for a zero.
0x609A
Homing acceleration
Sub-index 0
Access: RW
Range: 0 to 0xFFFFFFFF
Size: Unsigned 32
Unit: User-defined
acceleration units
Default: 0
Type:
UDINT
Description:
Indicates the configured acceleration and deceleration to be used during homing operation.
Index
Name
0x607A
target_position
0x60C0
Interpolation sub-mode select
0x60C2
interpolation_time_period
When using one of the CiA402 positioning modes, Distributed Clocks must be enabled.
Failure to do so may result in the SI-EtherCAT module going into the SAFE-
OPERATIONAL state.
NOTE
Содержание SI-EtherCAT
Страница 1: ...User Guide SI EtherCAT Part Number 0478 0152 02 Issue Number 2 ...
Страница 105: ......
Страница 106: ...0471 0152 02 ...







































































