





























5-29
EN
5.6.4
CAN3 connection (Engine RPM)
The CAN3 connector on the SCU harness is used to get the engine RPM
signal from an NMEA 2000 network. The Optimus system will also broadcast
data, such as rudder position. You have two options to make this connection:
Use existing bus:
if the boat already has a NMEA 2000 bus with an RPM
signal on it, you can simply connect the CAN3 harness to an available
DeviceNet tee on the bus. If no tee is available, you will need to add one
(CM10060). You may also require an extension harness from Table 5-7 to
extend the backbone and bring the tee within reach of the harness.
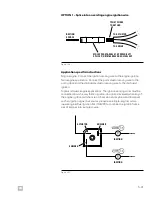
Create a new bus:
if the boat does not have an NMEA 2000 bus, you
can create one using kit HA5496. In addition to the kit you will need a
gateway device that bridges the engine network to the NMEA 2000 bus,
supplied by the engine manufacturer.
The instructions from section 5.6.3.2 apply to the CAN3 installation as well.
Figure 5-24.
NMEA 2000 GATEWAY
(NOT INCLUDED IN KIT. SEE ENGINE
RIGGING GUIDE)
TO 3A FUSED
12V POWER
SOURCE
MOUNT BUS SECURELY
BY USING
BOTH
SCREW HOLES
IN
EVERY
TEE
TO ENGINE BUS
TO STEERING
ACTUATOR
Содержание OPTIMUS 360
Страница 36: ...4 6 EN This page left intentionally blank ...
Страница 68: ...5 32 EN This page left intentionally blank ...
Страница 80: ...A 2 EN This page left intentionally blank ...
Страница 82: ...A 4 EN This page left intentionally blank ...
Страница 84: ...A 6 EN This page left intentionally blank ...
Страница 86: ...A 8 EN This page left intentionally blank ...
Страница 88: ...A 10 EN This page left intentionally blank ...
Страница 90: ...A 12 EN This page left intentionally blank ...





































































