





























Common Problems and Solutions
TMC 188/40 Motion Control Module
Delta Computer Systems, Inc. 360/254-8688
54
Axis indicator is constant red
This indicates the transducer is not responding to the module. Every two milliseconds the module
interrogates the transducer's position. If a return response is not seen, the indicator will be a
constant red. Check the following:
A) Polarity of the interrogation pulse (see page 48).
B) External transducer power supply to make sure 15 volts is present
C) Transducer power from the module to make sure 15 volts is present
D) External transducer power supply to make sure +5 volts is present
If the +12 volt output is used, check its voltage also. If not present, make sure a +15 volt
supply is connected.
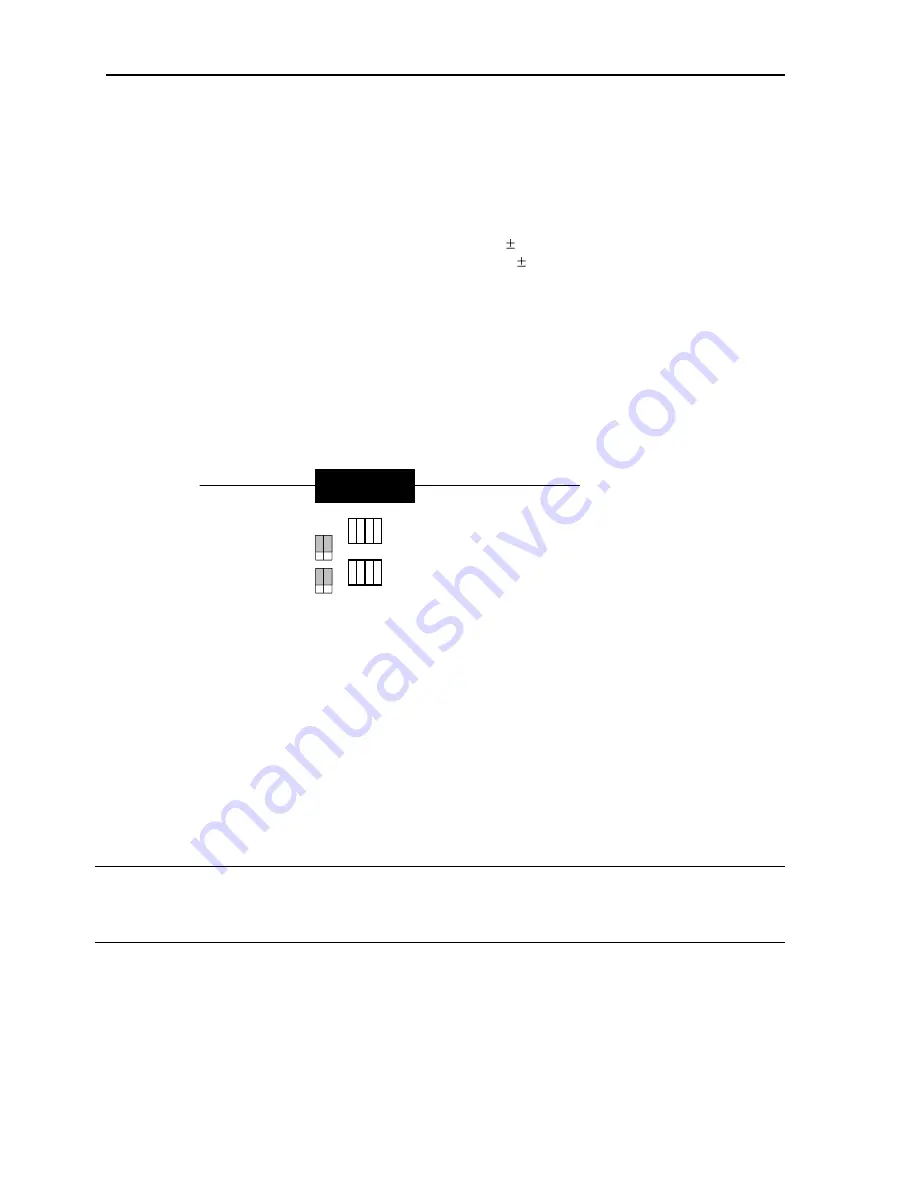
If the transducer power provided by the module has failed, check the 4.7 ohm and 15 ohm
resistors on the module (see below). These resistors act as fuses and may be open if there
is a problem with the transducer or external wiring. Change the 4.7 ohm 5% resistor(s) if
there is a problem with the -15 volt supply. Change the 15 ohm 5% resistors if there is
problem with the +15 volt supply.
P5
P7
DB-25S
P4
P6
R41
R53
R44
R50
R41-R44 15 ohm +15 volt protection resistors
R41 Axis 1
R42 Axis 2
R44 Axis 4
R43 Axis 3
R50-R53 4.7 ohm -15 volt protection resistors
R50 Axis 1 R51 Axis 2
R53 Axis 4
R52 Axis 3
During a move, the axis comes to a halt for no apparent reason
When the module detects a transducer error an emergency stop is made. See "ACTUAL
POSITION is erratic" above for more information. Other reasons for halting are the P/C
commanded a Halt or one of the following errors happened:
Lag error
Lead error
Overdrive error
Stopped
Position overflow
Parameter error
These errors will cause the axis to stop if the HALT MASK does not have the error bits masked
(see STATUS WORD bit descriptions starting on page 23 for more information).
NOTE:
The TRANSDUCER NOT RESPONDING bit (bit 6 of the STATUS word) is NOT latched.
Transducer errors will always cause emergency stops, but with intermittent errors, bit 6 may be
cleared before the P/C sees it. In this case, the axis will remain stopped with the HALTED bit
(bit 14) set. The axis will be in open loop and will drift if the valve null is off.







































































