





























Retrieving Steering Device Information
The PVED-CL continuously transmits status information on which steering devices is mapped in the
system and their present state. Refer to OperationStatus in
PVED-CL Communication Protocol
, 11079551.
Steering Wheel Sensor Noise Gate
Noise from the SASA sensor may be a result from sampling noise on the least significant bits or
mechanical vibrations causing small steering wheel movements. Regardless of the cause, the noise in the
SASA message data may propagate though the PVED-CL and show itself as small pressure build-ups or
small wheel movements. This high SASA sensitivity is desired for high controllability and good response
to slow steering wheel movements whereas it is less desired when the steering wheel is not activated.
A compromise can be achieved by setting up the steering wheel sensor noise gate to filter out small
steering wheel data changes after some specified time with no steering wheel activation.
StwDxFilterThreshold parameter defines the steering wheel angle over time threshold, where a ‘no
steering wheel activation’ confidence timer is incremented. Any steering wheel activation which results
in a steering wheel angle/dt higher than StwDxFilterThreshold will reset the timer.
StwDxFilterStartTime parameter defines the time in ms that the ‘no steering wheel activation’
confidence timer shall reach before the noise gate will floor any steering wheel input to 0. As long as the
confidence timer is below StwDxFilterStartTime, all steering wheel inputs will pass the noise gate.
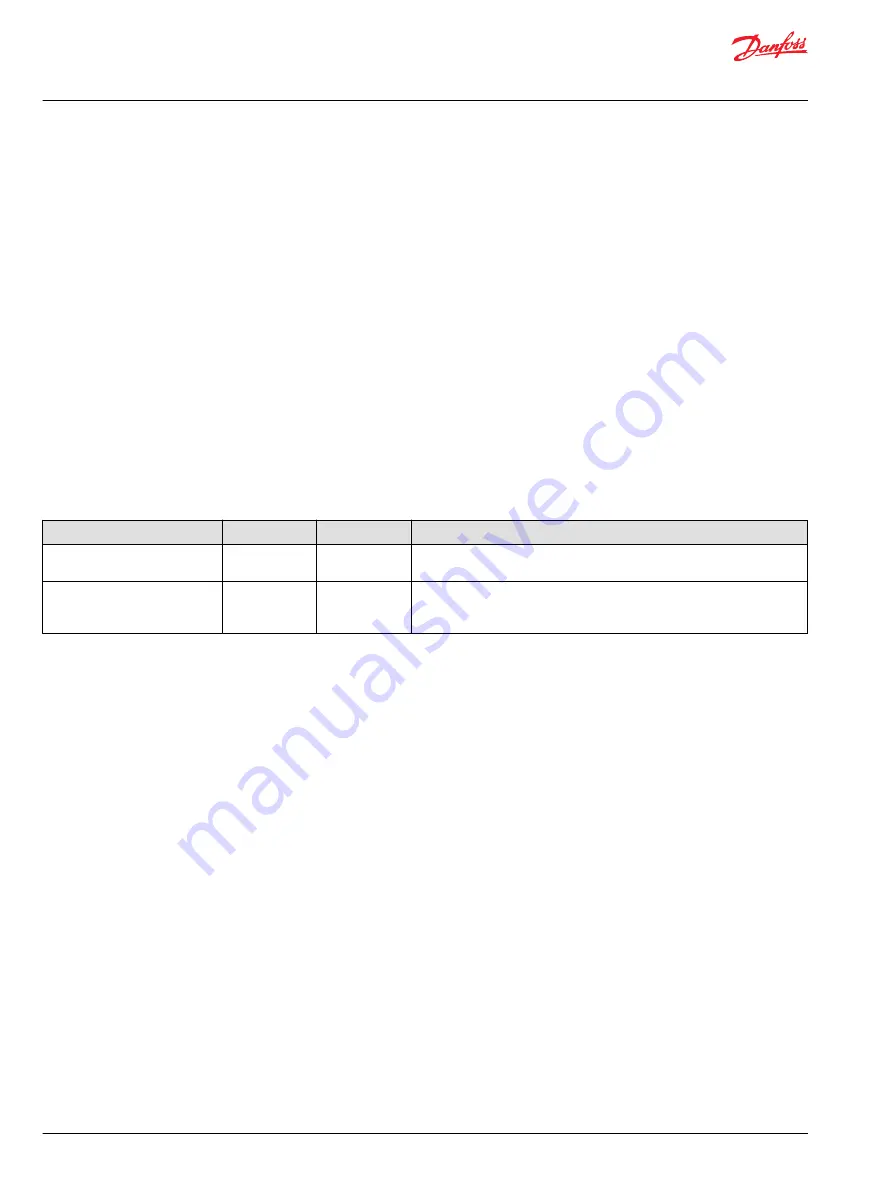
Device
Index
Default
Value range
StwDxFilterThreshold
64020
2
0,1: Disable filtering
[2 ; 4095]: dPosition/dt
StwDxFilterStartTime
64021
0
0: filter always enabled
[0; 65515]: Time in ms
[65516 ; 65535]: Disables the timer
Example:
Analyzing the SASA data while the steering wheel is not activated, shows that the position change
fluctuates ± 2 peak-peak. Converted to steering wheel rpm, this corresponds to:
2 ticks • (1000 ms / 10 ms) • 60 sec / 4095 ticks = 2.9 rpm
Where:
•
10 ms is the steering wheel position change sampling period
•
(1000 ms / 10 ms) is the steering wheel position change per second
•
4095 is the position change measured in ticks for one steering wheel revolution.
To cut out any steering wheel activation below 2.9 rpm for more than 5 seconds, set
StwDxFilterThreshold equal to 2 and StwDxFilterStartTime equal to 5000. This will allow very slow
steering wheel activation below 2.9 rpm (or noise) for 5 seconds, before the noise gate cuts of the input.
The values in this example are suggested starting values for a tuning process.
Operation Manual
PVED-CL Controller for Electro-Hydraulic Steering, Version 1.38
Steering Wheel Sensor Noise Gate
38 |
©
Danfoss | May 2016
11025583 | AQ00000216en-US0302