





























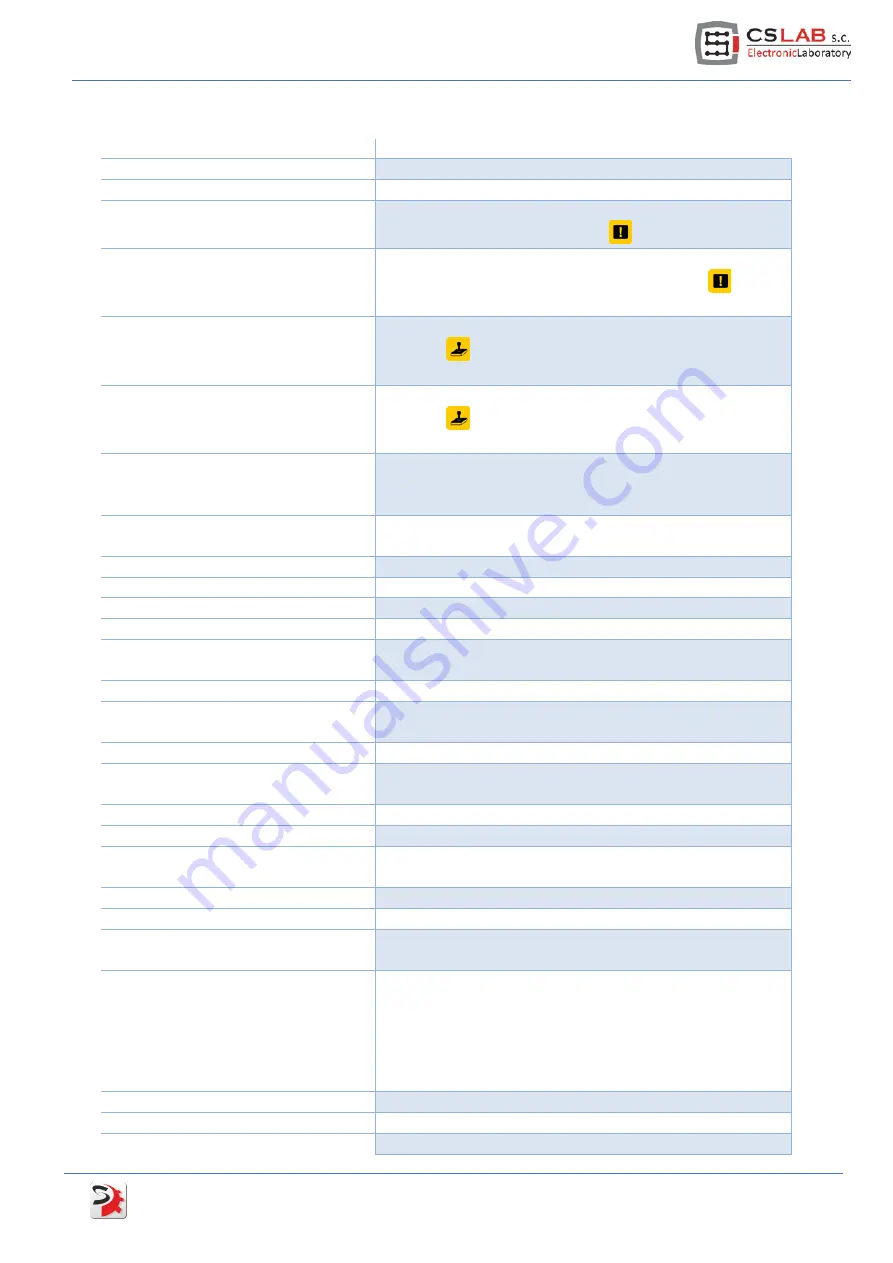
Here is a list of parameters which preview is available with their short description.
PARAMETER NAME
DESCRIPTION
Firmware version
Drive firmware version
Drive status
Current drive state
Alarm flags
Alerts. Detailed alerts description in menu „Tools
Show
Alerts” or after pressing the icon
on the toolbar.
Warning flags
Warnings. Detailed alerts description in menu
„Tools
Show Alerts” or after pressing the icon
on the
toolbar.
Digital inputs
Digital inputs state. You can see extended preview after
pressing
on the toolbar or by selecting „Tools
JOG
and I/O control” from the menu.
Digital outputs
Digital outputs state. You can see extended preview after
pressing
on the toolbar or by selecting „Tools
JOG
and I/O control” from the menu.
External 5V output
Current voltage value on pin 18 (encoder and Hall sensors
power supply) of a signal connector. Correct value: 5V +/-
10%
24V power supply
Current value of logic power supply. Correct value: 24V +/-
10%
Power stage temperature
Power output stage temperature (
O
C)
Torque scan state
Current state of torque scanner (function csTorqueScan™)
Autotuner state
Current state of PID regulators autotuning function.
Autotuner tuning state
Current stage of PID regulators tuning.
Planner idle flag
„1” value means that internal motion planner in a drive
finished operation and is in idle state.
Encoder position
Encoder position counter
Reference position
Controller position counter that is counter directly
connected with STEP/DIR signal.
Encoder velocity
The speed is counted on a motor's encoder
Reference velocity
The speed is counted on STEP/DIR control signal (converted
from frequency to revs/min)
Reference acceleration
The acceleration is counted on STEP/DIR control signal
STEP frequency
STEP signal frequency
Following error
Current deviation from the target position in encoder
pulses.
Following error (Max)
Max. temporary deviation from target position.
Velocity error
Current deviation from target speed.
Velocity error (Max)
Max. temporary deviation from target speed that results
from measured STEP signal frequency
Encoder errors
Encoder faulty readouts number. This value should be „0”.
If the value is higher than zero then it means wiring
problems or encoder failure. Encoder failure is very rare;
usually it's poor quality wiring or no contact of one of
encoder signal. Value higher than zero also means that
positioning errors will appear.
Mechanical angle (encoder)
Mechanical angle of motor rotor defined by an encoder
Electrical angle (encoder)
Electronic angle of motor rotor defined by encoder
Electrical angle (HALL)
(Brushless motors only). Electrical angle of motor rotor
simDrive™ AC Servo Drive -
U
SER
G
UIDE
27
Содержание SimDrive M4-H040K
Страница 1: ...Applies to hardware version v1 Applies to firmware version v2 00 Rev 1 0 copyright 2014 CS Lab s c...
Страница 9: ...2 1 Brushless motors AC BLDC simDrive AC Servo Drive USER GUIDE 9...
Страница 10: ...2 2 Brushed motors DC 10 simDrive AC Servo Drive User Guide...
Страница 17: ...4 1 4 Digital inputs IN0 IN5 4 1 5 Digital outputs OUT0 OUT2 simDrive AC Servo Drive USER GUIDE 17...





















































