





















47
3.4.4
CANBUS
battery chargers have two terminals made for connectors Molex Microfit 3.0, 6 circuits (reference 43045-
0600).
Documentation n°
1336205REG_CAN
(hardware and software specification) is available upon request.
Protocol
CAN-Bus protocol can be chosen with the programming field 3 (see 3.3.4).
Power Supply
The power supply of the CAN-Bus can either be carried out by another
equipment or by the charger itself.
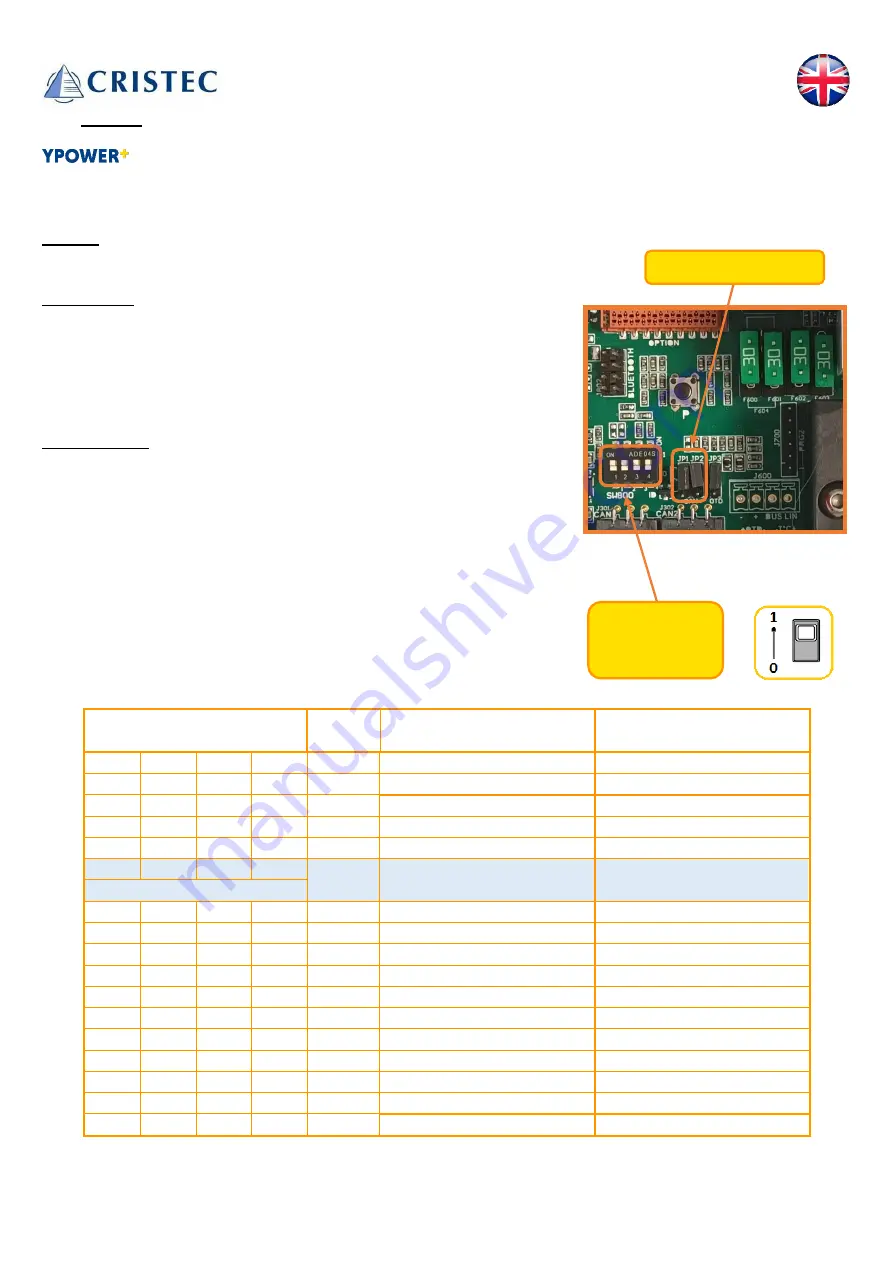
To generate the power supply, simply move the two jumpers JP1 and JP2 to
position 1-2.
Communication
To allow communication between multiple devices, each entity must have a
unique identifier (ID). This identifier must be selected using the 4 micro
switches (1,2,3,4).
Within the same CAN network, 4 sub-networks can be defined (A, B, C, D).
Thus, only the 4 entities of the sub-networks can communicate with each other.
Switches settings
ID
Master/Slave
function
Sub-network
1
2
3
4
N°
0
0
0
0
0
Master A
A
1
0
0
0
1
Master B
B
0
1
0
0
2
Master C
C
1
0
0
0
3
Master D
D
0
0
1
0
4
Slave A1
A
Factory settings
1
0
1
0
5
Slave B1
B
0
1
1
0
6
Slave C1
C
1
1
1
0
7
Slave D1
D
0
0
0
1
8
Slave A2
A
1
0
0
1
9
Slave B2
B
0
1
0
1
10
Slave C2
C
1
1
0
1
11
Slave D2
D
0
0
1
1
12
Slave A3
A
1
0
1
1
13
Slave B3
B
0
1
1
1
14
Slave C3
C
1
1
1
1
15
Slave D3
D
Jumpers JP1 et JP2
Dip switches :
(1, 2, 3, 4)







































































