





























-IO Expansion Board
Soloist HPe 50/75/100
N O T E :
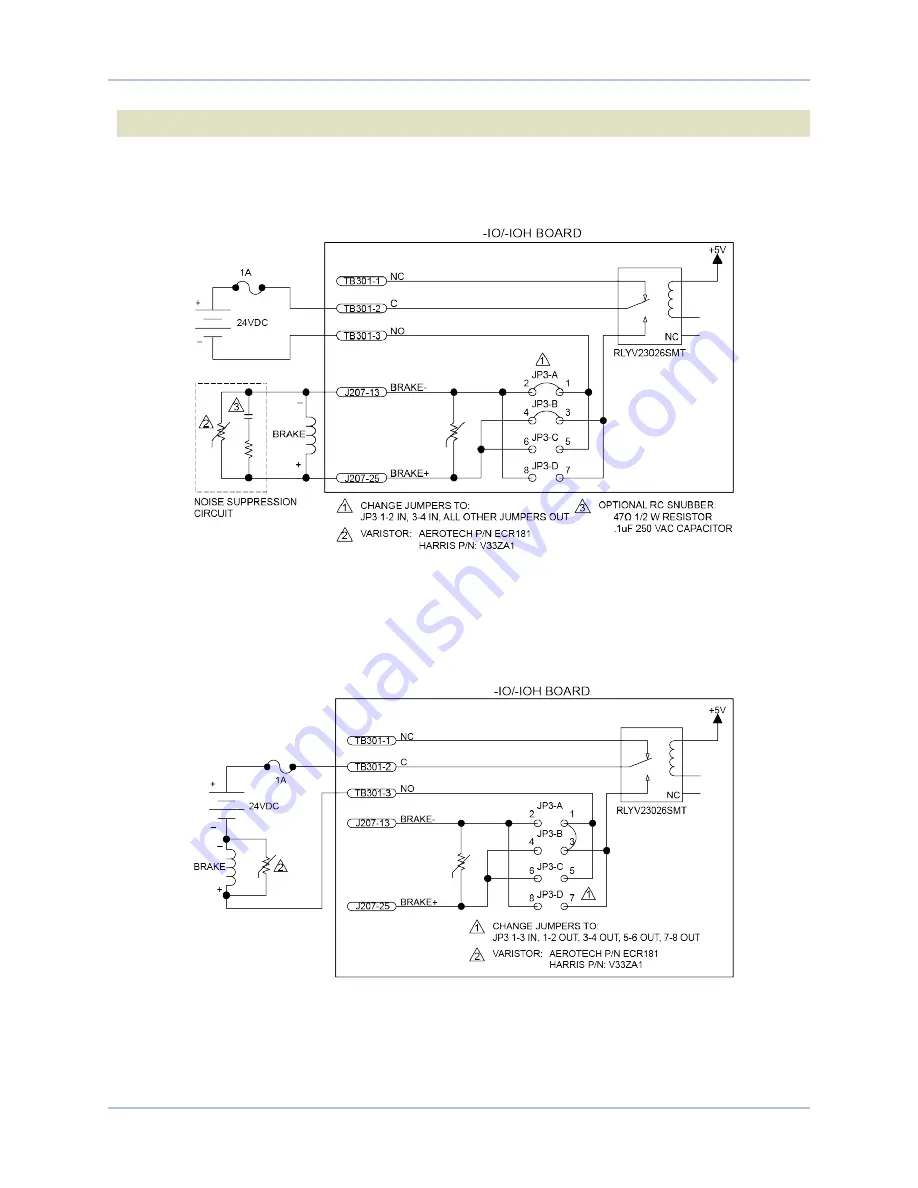
The user is responsible for providing fuse protection for the brake circuit.
is an example of a +24 VDC Brake connected to the Motor Feedback connector. In this example
the ex24 power source is connected to TB301. Note that JP3 is set 1-2 and 3-4 with all others
removed.
Figure 3-2:
Brake Connected to J207
is an example of a +24 VDC Brake connected to TB301. In this example, JP3 must be set 1-3 and
all other jumpers removed. Otherwise, the user must connect J207 pin 13 to J207 pin 25. In this case, J207
would function as an interlock to prevent the Brake from releasing if the Motor Feedback connector is not
connected.
Figure 3-3:
Brake Connected to TB301
www.aerotech.com
Chapter 3
73
Содержание Soloist HPe 100
Страница 1: ...Revision 4 09 00 Soloist HPe 50 75 100 Hardware Manual ...
Страница 14: ...Soloist HPe 50 75 100 Quick Installation Guide 14 www aerotech com This page intentionally left blank ...
Страница 24: ...Soloist HPe 50 75 100 Introduction 24 Chapter 1 www aerotech com This page intentionally left blank ...
Страница 57: ...Installation and Configuration Soloist HPe 50 75 100 Figure 2 26 PSO Interface www aerotech com Chapter 2 57 ...
Страница 94: ...94 Chapter 5 www aerotech com Soloist HPe 50 75 100 Accessories This page intentionally left blank ...
Страница 100: ...100 Chapter 6 www aerotech com Soloist HPe 50 75 100 Maintenance This page intentionally left blank ...
Страница 104: ...Soloist HPe 50 75 100 Revision History 104 Appendix B www aerotech com This page intentionally left blank ...







































































