





























&DOLEUDWLRQ
3.2.5. Calibration sensor mounting positions, CalPend
3HAC 16578-1 Revision: E
46
© Copyri
ght
200
3-2007 ABB.
All rights reserved.
&DOLEUDWLRQVHQVRUPRXQWLQJSRVLWLRQV&DO3HQG
,QWURGXFWLRQ
This section specifies the mounting positions and directions of all calibration sensors on all
robot systems using Calibration Pendulum II.
5HPRYDORIHTXLSPHQW
Before fitting sensors to the robot:
•
Make sure that there is no cabling that could affect the position of the sensor!
•
Remove any position switches from axis 1. It is not possible to fit the sensor at the
reference position otherwise!
Additional information on calibration, alternative calibration positions etc, may be found in
the Product manual of the robot.
5HOHDVLQJRIFRPSUHVVHGVSULQJ
1RWH
Release the compressed spring on the pendulum calibration tool after calibration of
axis 1. Also release the spring after calibration of axis 6 on IRB 260 and IRB 660.
Detailed instructions of how to compress/release the spring is given in section
IRUXVLQJVHQVRURQD[HVDQG&DO3HQGRQSDJH
,5%,5%
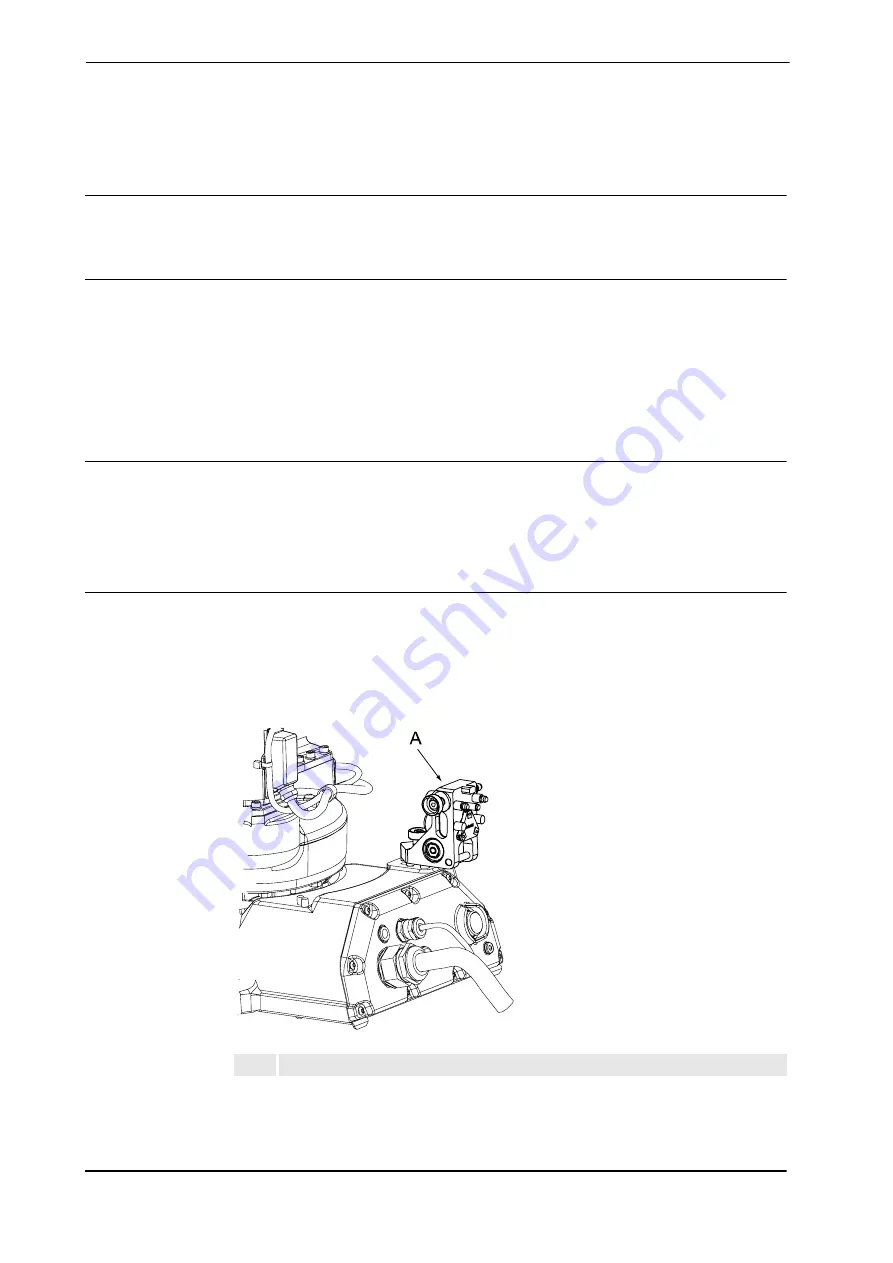
The illustrations below show the mounting positions and directions for both the reference
sensor and axis sensors on the robot. Notice that the pendulum is only fitted in one position
at a time! Notice also that the direction of the sensor is always the same, on each axis!
Reference position, IRB 140
xx0200000244
A
Calibration pendulum as reference sensor in reference position at base
&RQWLQXHVRQQH[WSDJH
Содержание S4Cplus
Страница 1: ...DOLEUDWLRQ 3HQGXOXP LQVWUXFWLRQ DOLEUDWLRQ HTXLSPHQW S4Cplus IRC5...
Страница 2: ......
Страница 6: ...7DEOH RI RQWHQWV 4 3HAC 16578 1 Revision E Copyright 2003 2007 ABB All rights reserved...
Страница 84: ...QGH 82 3HAC 16578 1 Revision E Copyright 2003 2007 ABB All rights reserved...
Страница 85: ......







































































