






















24
GoCart200 Omni Service Manual
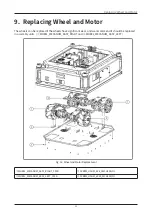
For ① WHEEL_MECANUM_ASSY_RIGHT or ② WHEEL_MECANUM_ASSY_LEFT, refer to the following
procedures.
1. Lift or lean the robot to secure the space for wheel maintenance.
2. Remove COVER_BTM_WATER_PROOF_CSSD. (⑥,
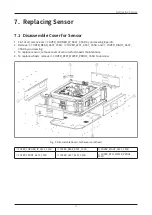
Figure. 4 2 Disassemble Covers for Sensors or
Wheels
).
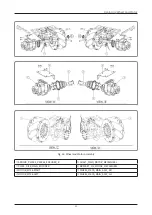
3. Disconnect 3 cables (motor, encoder for FuSa, and thermistor temperature sensor).
Fig. 17: Wheel and Motor Cables
4. ① WHEEL_MECANUM_ASSY_RIGHT or ② WHEEL_MECANUM_ASSY_LEFT needed to fix to unscrew 8
(④) points.
5. Replace the unit with a new one.
•
The left WHEEL_MECANUM_ASSY and the right WHEEL_MECANUM_ASSY have different parts. Check
the shape of the part again before the assembly.







































































