





























5 Adjustments
5.8.2 Manual Adjustment of Friction Compensation
5-60
(2) Operating Procedure for Friction Compensation
The following procedure is used for friction compensation.
CAUTION
• Before using friction compensation, set the moment of inertia ratio (Pn103) as accurately as possible. If
the wrong moment of inertia ratio is set, vibration may result.
Step
Operation
1
Set the following parameters for friction compensation to the factory setting as follows.
Friction compensation gain (Pn121): 100
Friction compensation coefficient (Pn123): 0
Friction compensation frequency correction (Pn124): 0
Friction compensation gain correction (Pn125): 100
Note: Always use the factory-set values for friction compensation frequency correction (Pn124) and friction
compensation gain correction (Pn125).
2
To check the effect of friction compensation, gradually increase the friction compensation coefficient (Pn123).
Note: Usually, set the friction compensation coefficient value to 95% or less. If the effect is insufficient,
increase the friction compensation gain (Pn121) by 10% increments until it stops vibrating.
Effect of Parameters for Adjustment
Pn121: Friction Compensation Gain
This parameter sets the responsiveness for external disturbance. The higher the set value is, the better the
responsiveness will be. If the equipment has a resonance frequency, however, vibration may result if the set
value is excessively high.
Pn123: Friction Compensation Coefficient
This parameter sets the effect of friction compensation. The higher the set value is, the more effective friction
compensation will be. If the set value is excessively high, however, the vibration will occur easily. Usually,
set the value to 95% or less.
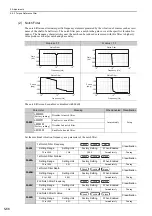
3
Effect of Adjustment
The following graph shows the responsiveness with and without proper adjustment.
⟎Ꮕ
⟎Ꮕ
ᜰࡄ࡞ࠬㅦᐲ
ᜰࡄ࡞ࠬㅦᐲ
⟎Ꮕ
⟎Ꮕ
ᜰࡄ࡞ࠬㅦᐲ
ᜰࡄ࡞ࠬㅦᐲ
ᡂᄢ㧘ᡂዊ
ᡂᄢ㧘ᡂዊ
ᡂᄢ
ᡂᄢ
Position error
Reference speed
Position error
Reference speed
Small friction
Responsiveness
is stable by
friction
compensation.
Large friction
Without friction compensation
With friction compensation
Insufficient responsiveness
because of friction
MECHA







































































