





























5.2 Tuning-less Function
5-15
5
Adjustm
e
nts
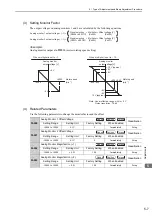
Note: If the rigidity level is changed, the automatically set notch filter will be canceled. If vibration occurs, however, the
notch filter will be set again automatically.
(3) Alarm and Corrective Actions
The autotuning alarm (A.521) will occur if resonance sound is generated or excessive vibration occurs during
position control. In such case, take the following actions.
Resonance Sound
Reduce the setting of the rigidity level or load level.
Excessive Vibration during Position Control
Take one of the following actions to correct the problem.
• Increase the setting of the rigidity level or reduce the load level.
• Increase the setting of Pn170.3 or reduce the setting of Pn170.2.
(4) Parameters Disabled by Tuning-less Function
When the tuning-less function is enabled in the factory settings, the settings of these parameters are not avail-
able: Pn100, Pn101, Pn102, Pn103, Pn104, Pn105, Pn106, Pn160, Pn139, and Pn408. These gain-related
parameters, however, may become effective depending on the executing conditions of the functions specified
in the following table. For example, if EasyFFT is executed when the tuning-less function is enabled, the set-
tings in Pn100, Pn104, Pn101, Pn105, Pn102, Pn106, and Pn103, as well as the manual gain switch setting,
will be enabled, but the settings in Pn408.3, Pn160.0, and Pn139.0 will be not enabled
.
∗
: Parameter enabled
×
: Parameter disabled
6
Press the
Key to complete the tuning-less func-
tion. The screen in step 1 will appear again.
(cont’d)
Step
Display after Operation
Keys
Operation
㧾㨁㧺 ̆㧲㨁㧺㧯㨀㧵㧻㧺̆
㧲㨚㧜㧟㧜
㧲㨚㧞㧜㧜
㧲㨚㧞㧜㧝
㧲㨚㧞㧜㧞
Parameters Disabled by Tuning-less Function
Related Functions and Parameters*
Item
Name
Pn Number
Torque
Control
Easy
FFT
Mechanical
Analysis (Ver-
tical Axis
Mode)
Gain
Speed Loop Gain
2nd Speed Loop Gain
Pn100
Pn104
Speed Loop Integral Time Constant
Pn101
×
2nd Speed Loop Integral Time Constant
Pn105
Position Loop Gain
2nd Position Loop Gain
Pn102
Pn106
×
Moment of Inertia Ratio
Pn103
Advanced
Control
Friction Compensation Function Selec-
tion
Pn408.3
×
×
×
Anti-resonance Control Adjustment
Selection
Pn160.0
×
×
×
Gain Switch-
ing
Gain Switching Selection Switch
Pn139.0
×
×
×