





























157
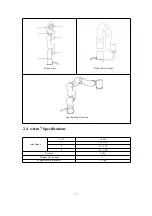
Figure 2.1 xArm6 singularity
2.Characteristics
The characteristic of the singularity is that the planning movement cannot be
performed correctly. Coordinate-based planned movements cannot be explicitly
translated into joint motions of each axis. When the robot performs motion
planning (linear, circular, etc., excluding joint movements) near the singularity
point, it will stop to avoid high instantaneous speed of the joint when it passes
the singularity point. Therefore, try to avoid the singularity point or pass the
singularity point through joint motion.
3.Processing method for singularity point
Case 1: Singularity encountered during robot teaching
a) Switch the robot coordinate system to a joint coordinate system, and
pass the singularity point through joint motion.
Case 2: Singularities encountered while the program is running
a) When encountering a singularity point while running the program,
you can modify the position and attitude of the robot and re-plan the
path to the target point.





















































