





























TMCM-142 TMCL
TM
Firmware Manual (V1.06 / 2014-JUN-24)
38
Copyright © 2009, TRINAMIC Motion Control GmbH & Co. KG
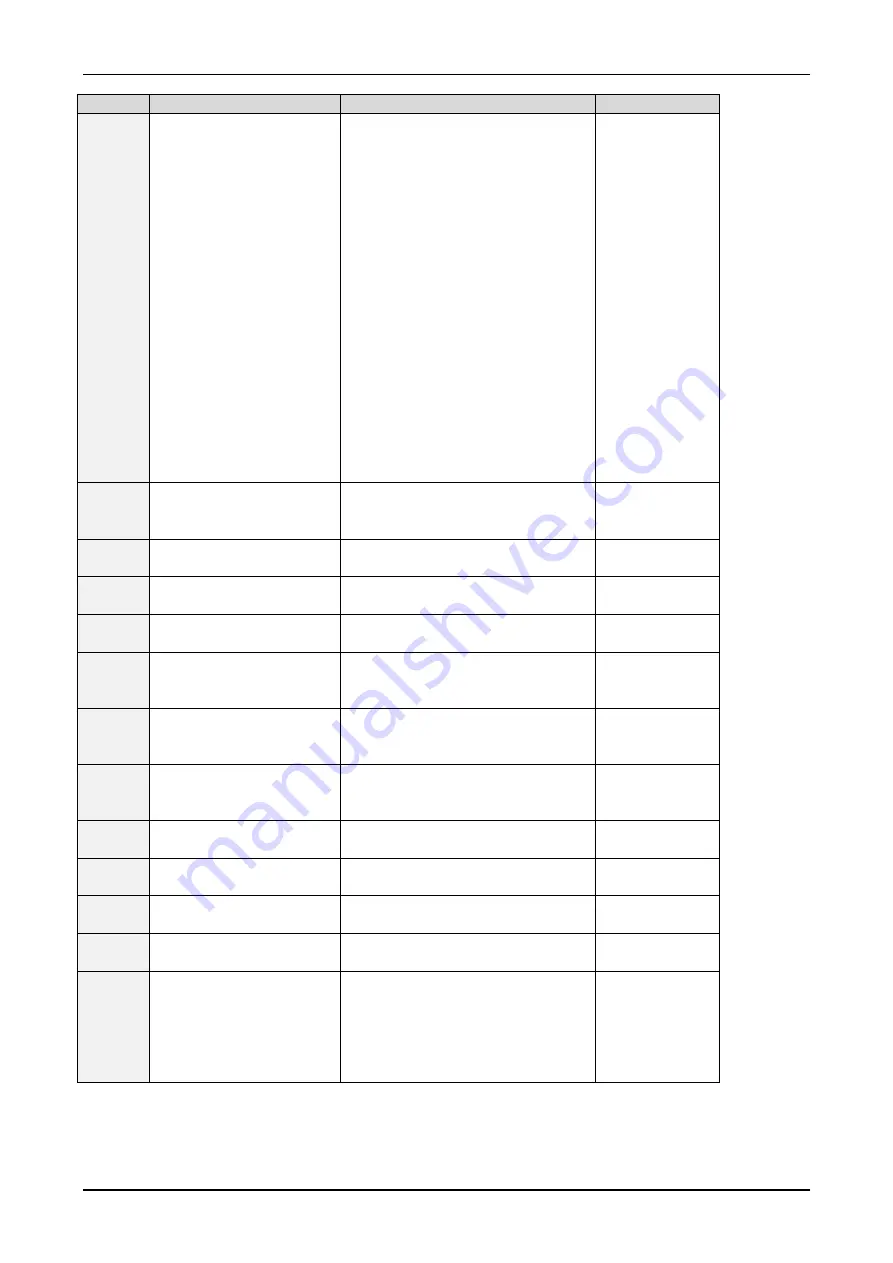
Number Axis parameter
Description
Range [Unit]
43
Encoder mode
Bit 0: polarity of channel A when
null channel is active
Bit 1: polarity of channel B when
null channel is active
Bit 2: polarity of null channel
Bit 3: ignore polarity of A and B
channel when null channel is active
Bit 4: continuous clear while null
channel is active
Bit 5: clear once at next null
channel event.
Bit 6: null channel is positive edge
triggered
Bit 7: null channel is negative edge
triggered
Bit 8: clear encoder position on null
event (otherwise it is latched only)
Bit 13: Encoder divisor selection
(0=encoder constant/65535,
1=encoder constant/10000).
44
Encoder status
1 when an encoder null channel
event has been detected.
Cleared after reading.
0/1
45
Encoder latch
Encoder position latched on N
channel event.
[µsteps]
46
Position latch
Motor position latched on stop
switch event.
47
Encoder warn distance
Maximum deviation between motor
and encoder.
[µsteps]
48
Compare position
Tbd
-2147483648 …
+2147483647
[µsteps]
50
Right position limit
Position limit when moving in
positive direction.
-2147483648 …
+2147483647
[µsteps]
51
Left position limit
Position limit when moving in
negative direction.
-2147483648 …
+2147483647
[µsteps]
52
Right position limit
enable
The motor cannot drive beyond the
right position limit when set to 1.
0/1
53
Left position limit enable
The motor cannot drive beyond the
left position limit when set to 1.
0/1
63
Microstep table position
Position of the microstep table
pointer.
0…8191
64
Step pulse length
Length of the step pulses on the
step/direction output.
0…255
[1/16 MHz]
128
Ramp mode
Normally set automatically by the
ROL, ROR, MVP and MST commands.
0: positioning mode
1: reserved
2: velocity mode
3: hold mode
0...3





















































