
























Technosoft 2022
26
iPOS4803-SY Multi Axis System, EtherCAT Technical Reference
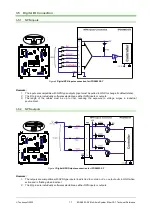
c) If the wires are longer than 2 meters, use twisted wires for the supply and ground return. For wires longer
than 20 meters, add a capacitor of at least 1000
μF (rated at an appropriate voltage) right
on the terminals of
the iPOS4803-SY.
d) If the motor power supply cable is shielded, it must be connected to PE – J1 pins 4, 8 and it is recommended
to be also connected to the motor chassis. The logic power supply cable shield must be connected to GND at
both ends.
3.9.1.2
Recommendations to limit over-voltage during braking
During abrupt motion brakes or reversals the regenerative energy is injected into the motor power supply. This may
cause an increase of the motor supply voltage (depending on the power supply characteristics). If the voltage
bypasses 52V, the drive over-voltage protection is triggered and the drive power stage is disabled. In order to avoid
this situation you have 2 options:
Add a capacitor on the motor supply
big enough to absorb the overall energy flowing back to the supply. The
capacitor must be rated to a voltage equal or bigger than the maximum expected over-voltage and can be sized with
the formula:
2
2
2
NOM
MAX
M
U
U
E
C
−
×
≥
where:
U
MAX
= 52V is the over-voltage protection limit
U
NOM
is the nominal motor supply voltage
E
M
= the overall energy flowing back to the supply in Joules. In case of a rotary motor and load, E
M
can be
computed with the formula:
F
M
d
d
Ph
2
M
final
initial
L
M
2
M
L
M
M
T
2
t
t
R
3I
)
h
-
)g(h
m
(m
)
J
(J
2
1
E
ϖ
ϖ
−
−
+
+
+
=
where:
J
M
– total rotor inertia [kgm
2
]
J
L
– total load inertia as seen at motor shaft after transmission [kgm
2
]
ϖ
M
– motor angular speed before deceleration [rad/s]
m
M
– motor mass [kg] – when motor is moving in a non-horizontal plane
m
L
– load mass [kg] – when load is moving in a non-horizontal plane
g
– gravitational acceleration i.e. 9.8 [m/s
2
]
h
initial
– initial system altitude [m]
h
final
– final system altitude [m]
I
M
– motor current during deceleration [A
RMS
/phase]
R
Ph
– motor phase resistance [
Ω
]
t
d
– time to decelerate [s]
T
F
– total friction torque as seen at motor shaft [Nm] – includes load and transmission
In case of a linear motor and load, the motor inertia J
M
and the load inertia J
L
will be replaced by the motor mass and
the load mass measured in [kg], the angular speed
ϖ
M
will become linear speed measured in [m/s] and the friction
torque T
F
will become friction force measured in [N].
Kinetic energy
Copper losses
Friction
Potential energy







































































