





















FPVision, Colibri iNav and CrossFire micro
Same as previous, but with TBS Colibri flight controller with iNav (
http://inavflight.com
) firmware and
non-TBS GPS puck for autonomous flight including Return To Home with a predefined climb height, circle
flight, and waypoints.
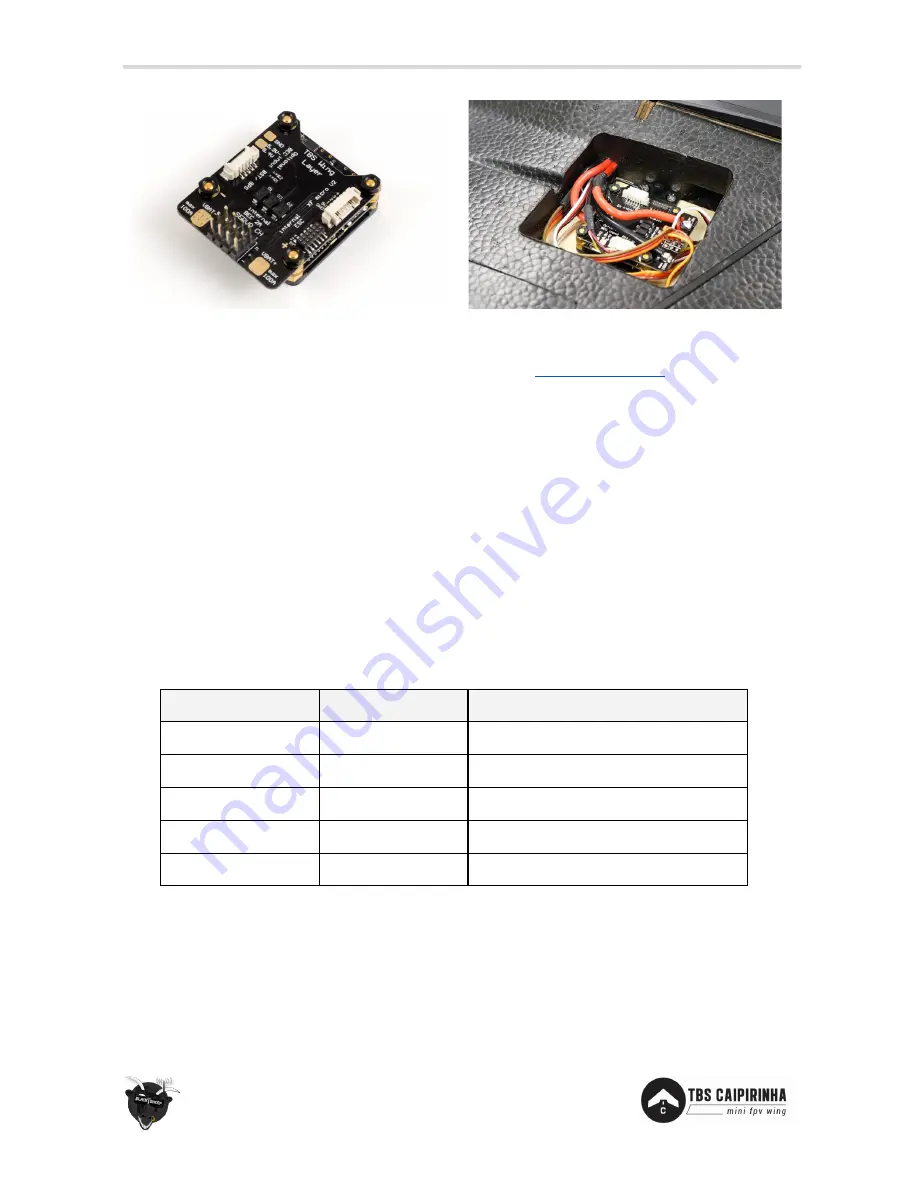
Speed controller
Install the ESC directly in the middle of where the motor mount slots begins. Use part of the adhesive
backed velcro to mount the ESC. Use bullet-connectors to connect to the motor. Connect the signal cable
to the R/C receiver and tuck it away in the rear cable channel. If the signal cable is too short, use an
extension servo cable to connect to the receiver. It is recommended to use 14 AWG rated wires to the PDB
or battery.
The recommended ESC settings are listed in the table below. Please refer to the ESC manual on how to
program these settings if it is not already pre-programmed.
Setting
Value
Description
Voltage cut-off:
Low
Keep it flying until the bitter end
Cut-off mode:
Soft
Gradually decrease throttle range
Start mode:
Normal
Quick propeller spin-up
Break:
On
Prevent prop from spinning freely (drag)
Timing:
High
Match the motor sync
22







































































