





























61
Explanation of PID method.
MAC6 equipped with flex PID which can be suited SV (target value) change followingness as a disturbance in
addition to the usual type SHIMAX PID which can be suited for a few target of a disturbance element (factory
setting)
This is explainaton a modification method of two types PID method both SHIMAX PID methid and Flex PID method.
Adjustment of each Factor
Auto tuning function calculates standard PID for the turbulence response but best value is not necessarily obtained
for all applications.
When the auto tuning function finished, it should be confirmed whether the auto tuning result is excellent by giving
turbulence by intention while checking the control result.
The integration limitation coefficient is trimmed
as an adjustment of the overshoot and undershoots. When
is enlarged, it becomes easy for the overshoot and undershoot to go out though the restoration speed quickens.
setting range=0.00~1.00
Default Value(Value of Output1 0.4 as same Output 1 &2)
(0.8 As Reverse-characteristic Output 1& 2)
Adjustment of follow for Start up and SV change
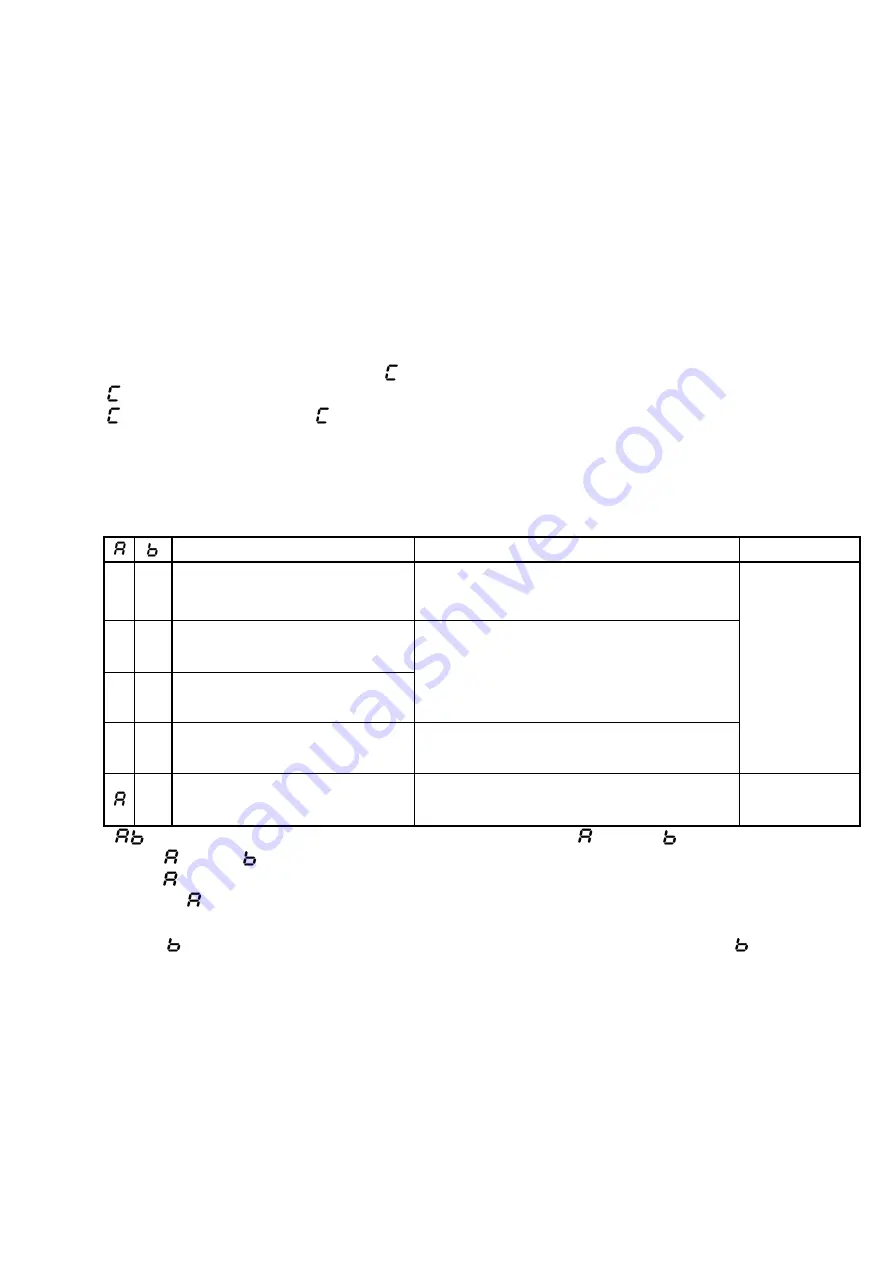
The turbulence response and the SV change follow can be individually set by Flexible PID method in MAC6. It already
set up the turbulence response, and now set it according to the purpose based on the table below.
Control method
Features
Remarks
1
1
I-PD (Measurements proportion
differentiation early type)
For fixation control
1 Flexible PID
control
1
0
ID-P (Measurements proportionally
early type)
The kickback by the SV value change is inferior
and a no bur and the target value
follow are a little inferior. For ramp control
0
1
IP-D (Measurements differentiation
early type)
0
0 PID (Deflection P I D )
For target value follow valuing and cascade
regulation
0 P-I-PD(P2 flexi type)
Turbulence response and target value follow
Like 2 flexible
PID control
setting range=0.00~1.00
Default value (FIX:
=0.40
=1.00 )
(PRG: =0.20 =0.20 )
should be reduced when you want to improve the step response at the SV change and the start-
up,
should be expanded when you wants to reduce the overshoot at the step responds and to reduce
the output change.
should be reduced when you want to improve the follow performance at the lamp control,
should be
expanded When you wants to reduce the overshoot at the lamp ends and to reduce the output change