





























stepIM
Technical Training Manual
26
6.
Leave the switch off, and select the
Inversion
option to invert the polarity
of the input:
The LED graphic turns green.
The drive becomes enabled.
Note that the LED on the Demo Kit input switch does not change states
when Inversion is selected.
7.
Clear the
Inversion
option.
Exercise - Input as Position Limit Switch
An input can be defined as a limit switch.
1.
Make sure switch
IN 2
and switch
IN 3
are
off
, and the drive is enabled.
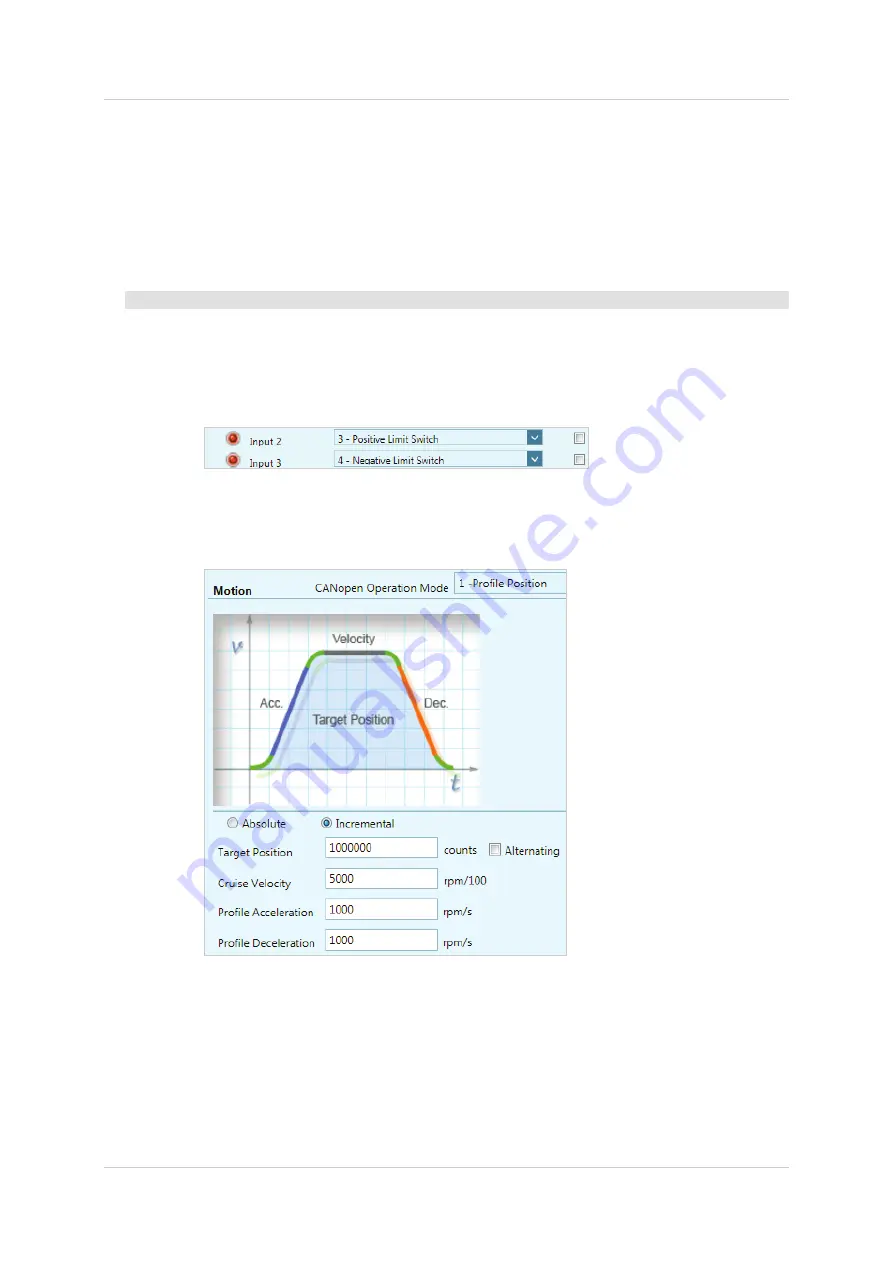
2.
In the Digital I/Os screen, set Input 2 Mode to
Positive Limit Switch
.
Set Input 3 to
Negative Limit Switch.
3.
Go to the
Motion
screen, select operation mode
Profile Position
, and
reenable the drive.
4.
Define a movement using the settings shown in the screen below.
5.
Enable the drive and press
Start
to start the movement.
While the motor is in motion, turn
on
switch
IN 2
.
Observe the stopping of the motor. It stops immediately.
Turn off switch IN 2. Motion does not resume automatically. You must
press
Start
again.
Summary of Contents for stepIM
Page 2: ......
Page 4: ...stepIM Technical Training Manual 2...