





























stepIM
Technical Training Manual
20
9
Basic Operation – Velocity
Note
: The drive must be disabled whenever the operation mode is changed.
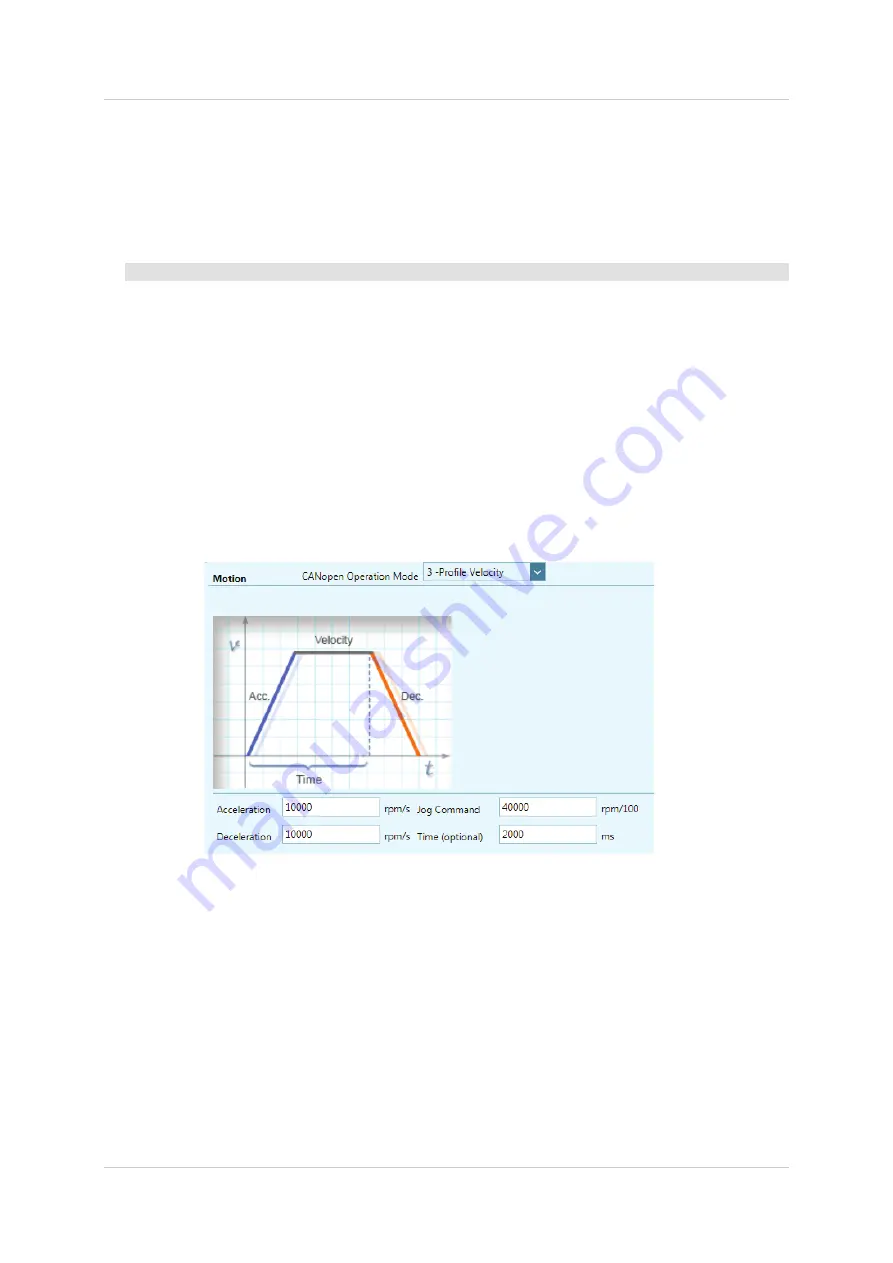
Exercise – Velocity Jog Command
1.
Make sure drive is online and disabled.
2.
From the ServoStudio navigation sidebar, select
Motion
.
3.
Set the Operation mode to
3-Profile Velocity
.
4.
Define a velocity Jog command that will move the motor at a speed of
400 rpm for 2 seconds.
Enter the parameter values as shown in the screen below.
Profile Acceleration:
10000
Profile Deceleration:
10000
Jog Command:
40000
Time:
2000
5.
Enable the drive.
6.
Click the
Start
button to start motion, and observe the motor load disk.
7.
Modify the parameter values as shown in the screen below.
Profile Acceleration:
1000
Profile Deceleration:
1000
Jog Command:
5000
Time:
10000
Summary of Contents for stepIM
Page 2: ......
Page 4: ...stepIM Technical Training Manual 2...