





























RTC
®
4 PC Interface Board
Rev. 1.3 e
4 Principle Of Operation
30
innovators for industry
4.5 Image Field Correction
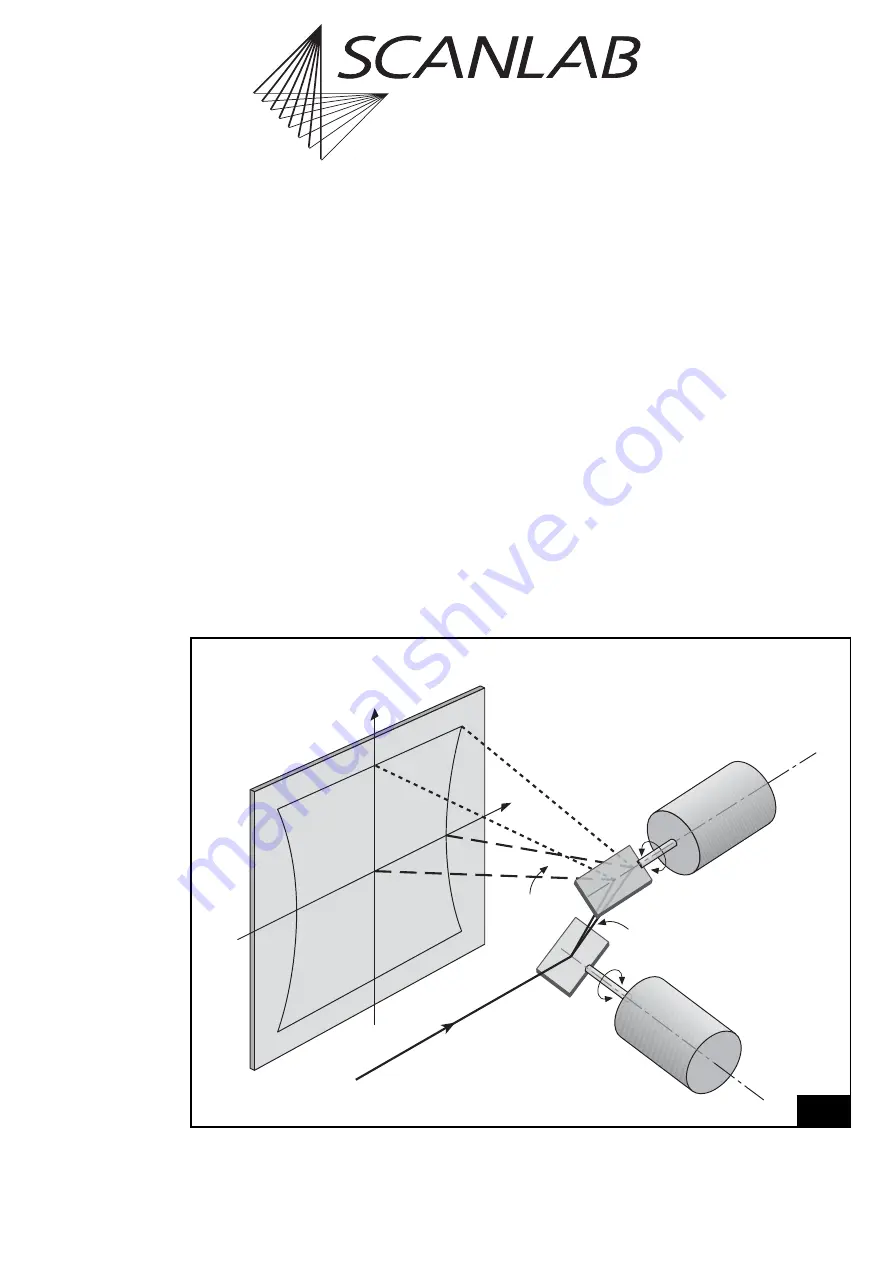
The deflection of a laser beam with a two-mirror
system results in three effects:
(1)
The arrangement of the mirrors leads to a certain
distortion of the image field – see
This distortion arises from the fact that
the distance between mirror 1 and the image
field depends on the size of the scan angles of
mirror 1 and mirror 2. A larger scan angle leads to
a longer distance.
(2)
The distance in the image field is not proportional
to the scan angle itself, but to the tangent of the
scan angle. Therefore, the marking speed of the
laser focus in the image field is not proportional
to the angular velocity of the corresponding
scanner.
(3)
If an ordinary lens is used for focusing the laser
beam, the focus lies on a sphere. In a flat image
field, a varying spot size results.
F
2
F
1
14
Galvanometer Scanner 1
Galvanometer Scanner 2
Beam In
Field distortion in a two-mirror deflection system







































































