





























5-17
Specifications and Reference Data
Intermittent Sensor
Algorithm and Damping
If the transmitter has both intermittent sensor detect and damping
enabled, the output reading is calculated by the following formula:
The transmitter output the corresponding value on the damping curce
within 1.75 to 2.0 seconds and updates the output reading every 500 ms
thereafter, according to the damping equation above. At the value to
which the damping time constant is set, the transmitter output is at
63 percent of the input change.
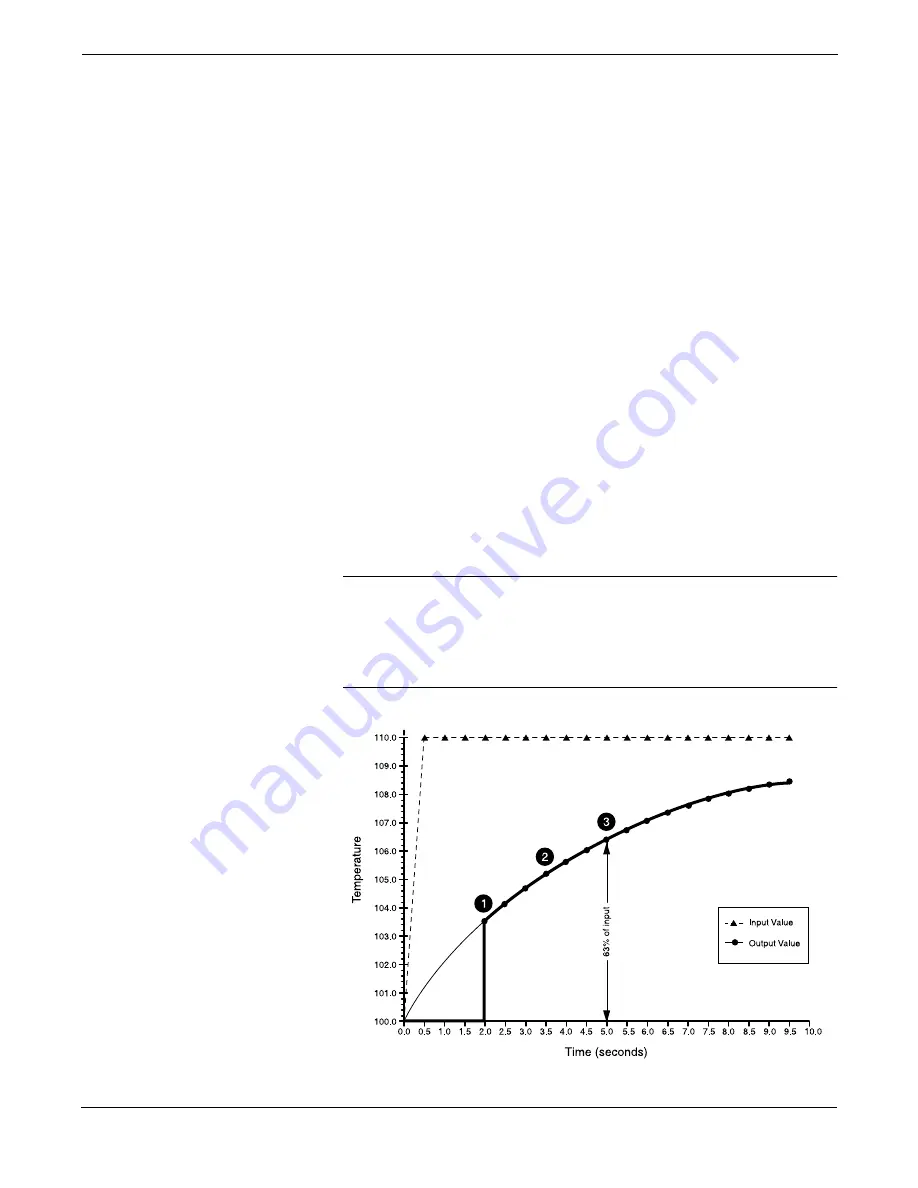
Figure 5-5 illustrates an example of intermittent sensor detect with
damping enabled. If the temperature undergoes a step change greater
than the threshold value, or from 100 degrees to 110 degrees, and the
damping is set to 5.0 seconds, the transmitter calculates a new reading
every 500 ms using the damping equation, but holds the output at
100 degrees for between 1.75 and 2.0 seconds. Within 1.75 and
2.0 seconds, the transmitter outputs the reading that corresponds to
the damping curve at that time (
➊
), and continues to calculate and
update the output reading every 500 ms thereafter (
➋
) according to the
damping equation. After 5 seconds, the transmitter outputs
106.3 degrees, or 63 percent of the input change (
➌
), and the output
continues to approach the input curve according to the equation above.
NOTE
If the damping time constant is set between 0 and 2 seconds, the
transmitter does not report the output change until the intermittent
sensor algorithm validates the input signal. After validating the input
signal, the transmitter outputs the value that corresponds to the
damping curve at that time.
Figure 5-5. Damping Function when
Input Change is Greater Than the
Threshold Value.
Damped Value
P
N
–
(
)
2
T
U
–
2
T
U
+
------------------
×
N
+
=
P =
previous damped value
N =
new sensor value
T =
damping time constant
U =
update rate
6
44-
644_
02A







































































