
























Safety
Operating Manual PMCprotego S12(C)
1002528EN03
10
}
PMCprotego D.12 from Version 1.1
}
PMCprotego D.24 from Version 1.1
}
PMCprotego D.48 from Version 1.1
}
PMCprotego D.72 from Version 1.1
3.1.1
Permitted motor types
The following motor types are approved for use with the safety card:
}
Rotary synchronous motors
}
Linear synchronous motors
Please note: The use of synchronous motors without motor encoder (sensorless operation)
is not permitted.
Work is in progress for use with:
}
Asynchronous motors
Please note the following fault detection guidelines:
When the drive is operated with an encoder (standard motor encoder on the servo ampli
fier), a fault on the encoder system is detected by the safety card as follows:
}
Rotary synchronous motors
Detected within one mechanical revolution of the motor.
}
Linear synchronous motors
Detected within the distance travelled, in accordance with the following formula:
Distance = (Number of poles /2)
·
Pole pair pitch
Commands in the servo amplifier:
– Number of poles: MPOLES
– Pole pair pitch: MPITCH
3.1.2
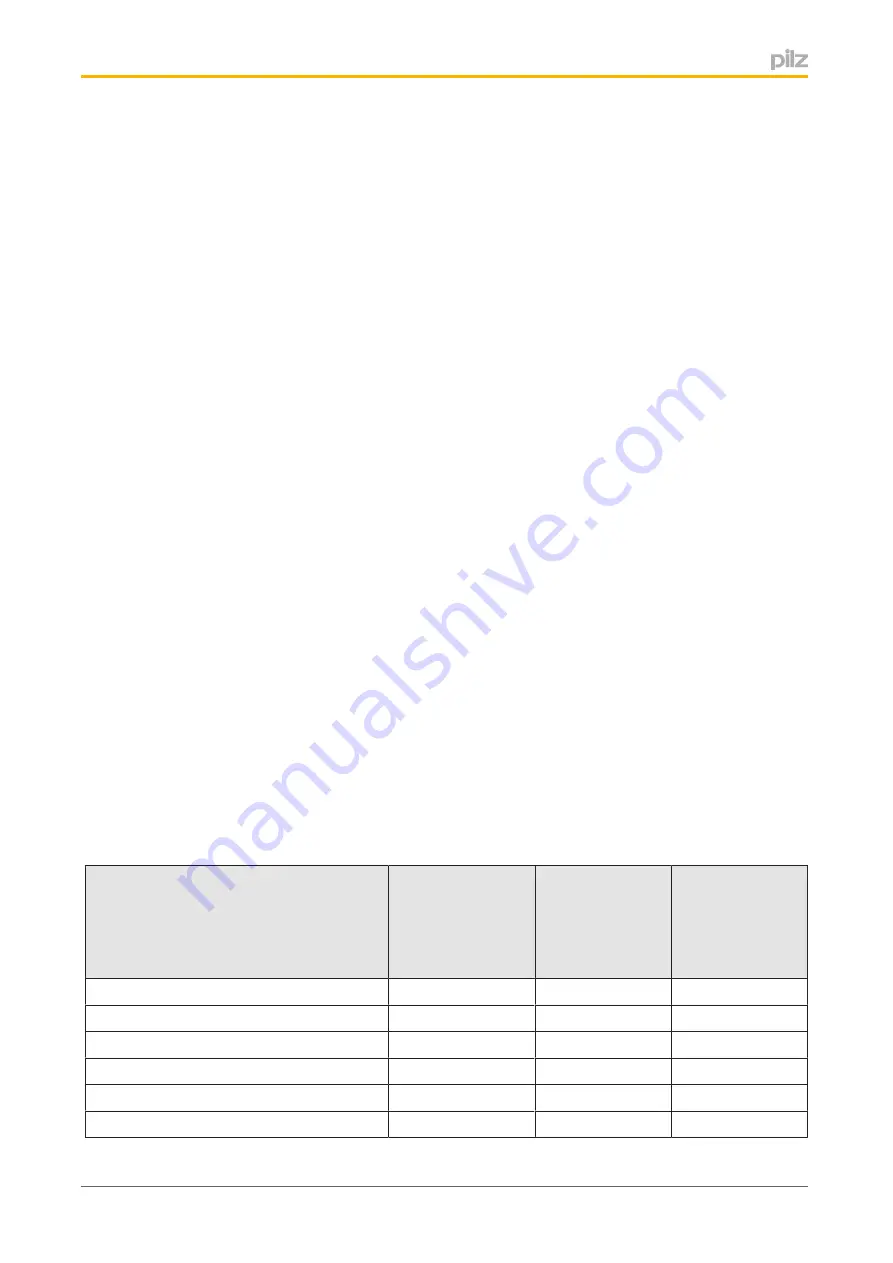
Permitted motor encoder types
The motor encoder is connected to an input on the servo amplifier. The following motor en
coder types are approved for use with the safety card:
Encoder type
Feedback type
(parameter
FBTYPE) in the
servo amplifier's
commissioning
software
Connection to
the servo ampli
fier
Status for opera
tion with safety
card
Resolver
0
X2
Enabled
Hiperface (Stegmann)
2
X1
Enabled
EnDat (Heidenhain)
4
X1
Enabled
SinCos 5 V with W&S
7
X1
Enabled
RS422 24V
12
X3
Enabled
ROD 5 V with Hall
15
X1
Enabled





















































