8
Specifications and Characteristics
Section 1-3
Note
As a general guideline it can be stated that if you want the timing requirements
for the Counter Inputs to satisfy the above mentioned specifications, you must
pay attention to the type of output driver of the encoder being used, the length
of the encoder cable and the frequency of the count pulses generated. For
C
A
A
B
B
50%
Off
On
E
Z
50%
Off
On
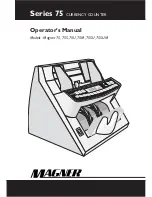
Counter inputs A and B
Input pulses with a duty factor of 50%
Counter inputs A and B
Input pulses with a duty factor of 50%
Counter Input Z *
D
D
D
Phase A
Phase B
Off
50%
On
Counter Input Z *
0V
Off
On
F
GG
0V
Off
On
Z
J
0V
Off
On
Phase A
Phase B
0V
Off
On
II
I
I
24V input signals (via Input Terminal Block)
RS-422 Line Driver signals
Counter Inputs A, B and Z
*Maximum allowed frequency of Z-pulses is 10 kHz
*Maximum allowed frequency of Z-pulses is 10 kHz
D
Relationship between A and B phases with phase
differential inputs
Relationship between A and B phases with phase
differential inputs
J
I
H
G
F
E
D
C
B
A
>10
>23
>100
>50
>100
>10
>23
>100
>50
<3
>10
>4.5
>20
>10
>20
>10
>4.5
>20
>10
<3
>10
>1
>4
>1
>2
Timing requirement [µs]
<3
>2
>4
>1
>10