
















Page-24
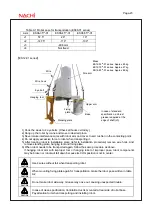
Table 9-2 Robot pose for transportation (ES12-01 series)
Axis ES12-55**-01 ES12-70**-01 ES12-85**-01
J1 -37.5°
-21.4°
-15.1°
J2 127.5°
111.4° 105.1°
J3
(*
)
0mm
J4 Not
fixed
(*) When J3 axis is operated to the end of stopper, its shaft will hit the floor.
So never forget to move robot arm to the above pose before transportation.







































































