


















Page-22
9. Transport procedure
【
ES06-01 series
】
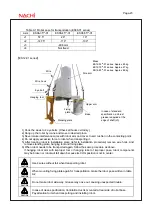
1) Do not dismount fixing plate A and B before transporting. Transport the robot by 2 persons. Use
a carrying table to the place near the installation position. When unloading robot from carrying
table and determine the strict position of installation, please follow the procedure written below.
2) One person holds the fore arm (A) side and (B) side of fixing plate A, and another person holds
the base side (C) of fixing plate A. Never hold robot cover directly. Robot cover may be broken
or robot itself may fall down, resulting in serious injury. Pay utmost attention not to apply
excessive force to robot over and robot body.
3) After installing robot, dismount the fixing plate A and B.
CAUTION
Never hold left/right side of robot arm and never hold robot cover.
CAUTION
Do not apply excessive force to the shaft (axis 3). Shaft may be damaged and overload
error may occur when operating robot.
CAUTION
When mounting fixing plate again for transportation, make the robot pose written in table
9-1.
CAUTION
Do not make robot side-way. Grease may ooze out, causing unexpected trouble.
CAUTION
In case of clean specification, Ventilation duct is mounted at rear side of robot base.
Pay attention to it when transporting and installing robot.
Fore arm
Upper arm
Fixing plate B
Fixing plate A
Mass
ES06-35**-01 series: Approx. 39kg
ES06-45**-01 series: Approx. 40kg
ES06-55**-01 series: Approx. 41kg
In case of standard
specification, anti-rust
grease is applied at the
edge of shaft (J3).







































































