

























Page-15
6. Allowable wrist load
CAUTION
Load fixed on the tip of wrist is regulated by “allowable payload mass”, “allowable static
load torque”, and “allowable moment of inertia”. Strictly keep the wrist load within each
allowable value. If wrist load exceeds the allowable value, this robot is out of guarantee.
Refer to the table of “2. Basic specifications” and following figures for the detail of each
specification.
■
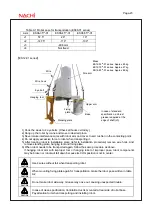
Torque map
Use the robot under condition that COG of wrist load falls on the range of following figure.
[Caution] Wrist load is greatly affected by robot speed and pose. If its weight is within the
permitted limit, vibration on arm or overload / over current error may occur. In that
case, slow down the robot speed or try to adjust acceleration (D1 to 3).
Also is tool constant was not set correctly, similar phenomenon may occur.
[Caution] Overhang amount such as moment and inertia written here is a dynamic limitation
which is determined by motor and reduction gear specification. Guaranteed
repeatability is at the center of mechanical interface surface. If long and low rigidity
tool is mounted and working point is far from the center, positioning repeatability
becomes worse or vibration on arm occur.
Allowable offset distance (Z direction) from bottom edge of shaft to tool COG is
100mm.
[Caution] Although tool is within the permitted limit, overload error may occur if robot
continuously moves to upward in extremely slow speed. In such case, robot speed
needs to be modified much faster.
[Caution]
Acceleration is automatically limited if tool COG becomes further from shaft center.
Allowable offset distance from shaft center to tool COG is
ES06 : 200mm or shorter ES12 240mm or shorter.
ES06-01 series
ES12-01 series
Rated moment of inertia
Shaft center
Shaft center
Maximum moment of inertia
Rated moment of inertia
Maximum moment of inertia







































































