



















Page-21
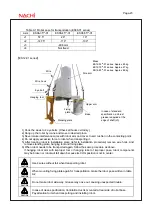
■ Connection of Gripper wires and tubes
*1) By utilizing “External wires and tubes box” option, gripper I/O cables and horses are able to go out from robot
body. This option contains following parts.
ES06-01 series : primary air tube φ6, 2 joints, secondary air tube φ4 and 8 joints
ES12-01 series : primary air tube φ6, 2 joints, secondary air tube φ6 and 8 joints
*2) By utilizing “Internal wires and tubes set for gripper” option, gripper I/O cables and air horses is able to get
through inside shaft. This option contains following parts.
ES06-01 series : air horse φ4 x 8, gripper input cables (8 signals and 2 powers)
ES12-01 series : air horse φ6 x 4, gripper input cables (8 signals and 2 powers)
Gripper output signals
Gripper input signals
Gripper output signal connector
Gripper output signal connector
Gripper input signal connector
Gripper input signal connector
Controller
Connection to solenoid valve
prepared by customer with
gripper output cables of option
Joint
board
in
robot
body
or
Direct connection to solenoid
valve set of option
Connection to gripper prepared
by customer with gripper input
cables of option
White
Black
Black
White
White
Black
Black
White
Black
White
Black
White
Black
White
Black
White
Black
White
Black
White
Black
White
Black
White
Black
White
Black
White
Brawn
White/Brawn
Green
Blue
Orange
White/Blue
White/Green
White/Orange
Signals for Multi purpose
electric driven gripper
<Power>
<Power>
<Aux>
<Aux>
Ethernet cable
(both side is LAN connector)
Flexible cable with shield
Primary air horse
Tubes
Connection to gripper and or so
prepared by customer
Solenoid
valve set
option
horse
horse
Quick joint
Quick joint
Fore arm
Base


































































