





























11.4.2 Moog D
RIVE
A
DMINISTRATOR
display
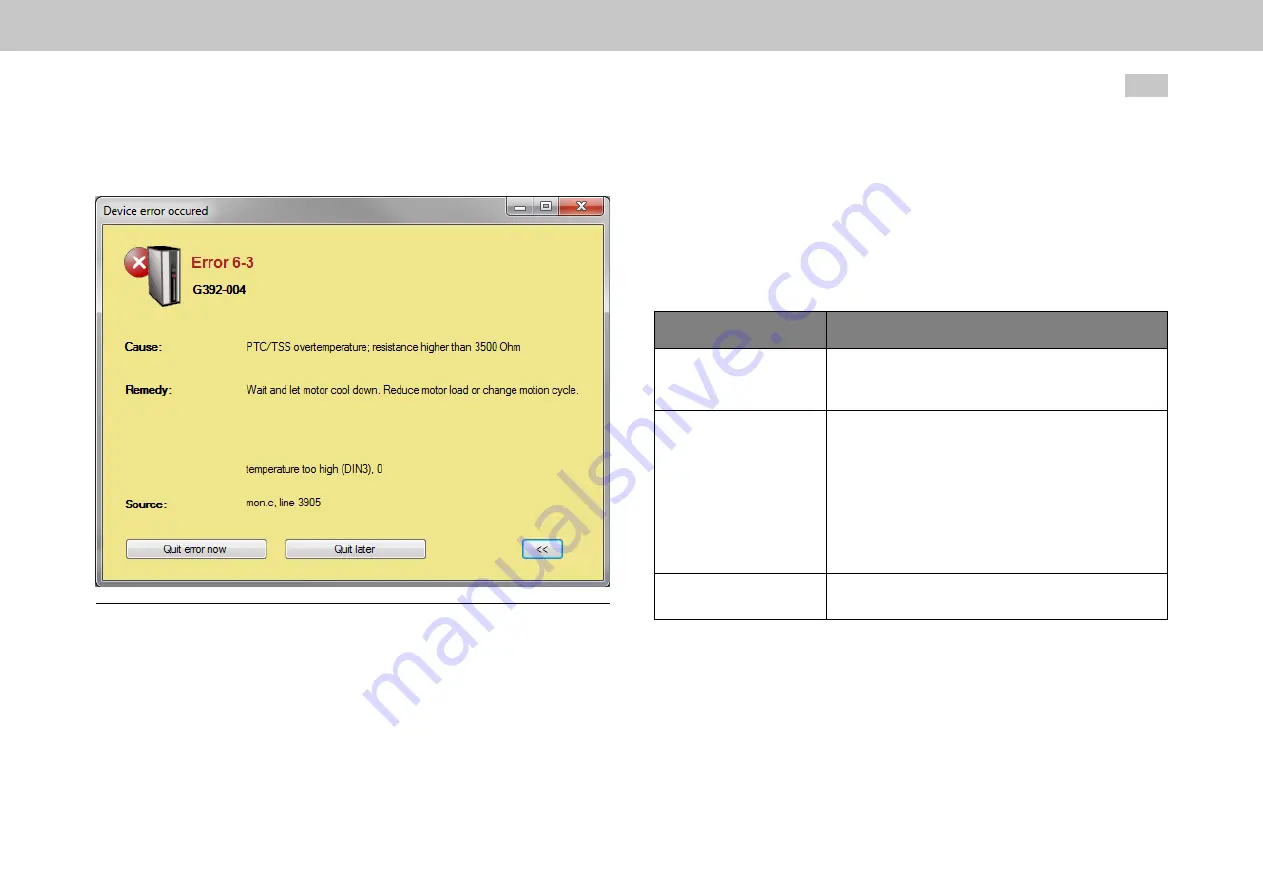
Fig. 11.4: Moog D
RIVE
A
DMINISTRATOR
error screen
Immediately after an error occurs, it will be shown in a window. After closing the
window by clicking on “Quit error” or “Later,” you can view the current error and the
20 most recent errors (see Section "Alarms & warnings (Details)" on page 25
MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD
Servo
Drive -
Device
Help
26
6
11 Alarm & warnings
11.5 Error re
actions
P 30 - ErrorReactions
is used to define how the servo drive will respond in
the event of an error. These responses are defined individually for 62
different error scenarios. A selection of up to nine different responses will be
available (
P 38[0] - ERR_Specific2OptCode
can be used to define an additional error
response if the servo drive features an optional function package.
Error reaction
Function
Ignore (0)
The error will be ignored
Exception: For the HW limit switch, in which case a
warning will be generated (
P 34
bit 29 or bit 30)
Specific1 (1)
The error will be reported; the response will be
carried out by the integrated PLC (V2.0 and higher)
Exception: For the HW limit switch, in which case a
warning will be generated (
P 34
bit 29 or bit 30) and
there will be a STOP request (deceleration with ramp
depending on the STOP option code, without any
change to the DRIVECOM system state). At standstill
the relevant direction is blocked as long as the limit
switch is active.
The error will be reported; the response will be
carried out by an external controller
Specific2 (2)
Table 11.6: Error re
actions







































































