

























7 CiA 402 DRIVE PROFILE
7.4 Control mode
39
7
7.4
Control mode
Selecting control mode (Modes of operation)
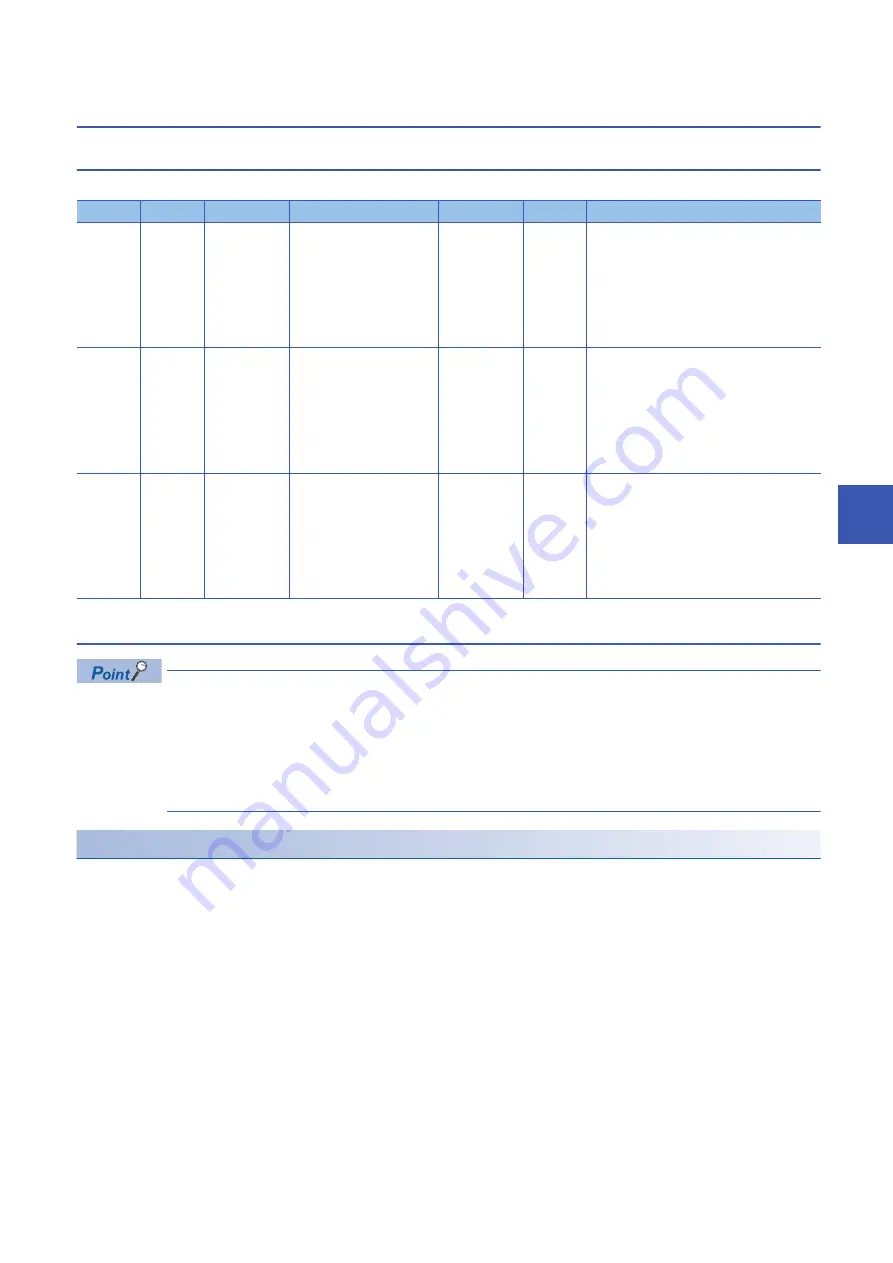
Specify a control mode with [Modes of operation (Obj. 6060h)]. [Modes of operation] can be rewritten with a PDO or an SDO.
Control switching
• Changes to the OMS bit of [Controlword (Obj. 6040h)] are not accepted until control switching is complete.
Before inputting a command, check that the control mode has been switched by referring to [Modes of
operation display (Obj. 6061h)].
• Update [Target position (Obj. 607Ah)] and [Position offset (Obj. 60B0h)] to [Position actual value (Obj.
6064H)] when changing the control mode from the mode other than the cyclic synchronous position mode
(csp) to the cyclic synchronous position mode (csp).
Control switching between position/speed/torque modes
As there is a time lag when switching between control modes, the controller needs to keep sending the command values of
the corresponding control modes until the mode is completely switched. After the completion of the control mode switching is
confirmed by [Modes of operation display (Obj. 6061h)], the controller can stop sending the command value relative to the
control mode before switching.
Before switching to or from the position mode, check that the servo motor is in zero speed state. Data of whether the servo
motor is in zero speed state can be obtained by Bit 3 (S_ZSP) of [Status DO 2 (Obj. 2D12h)]. If the motor is not in zero speed
state, the control mode will not be switched and therefore [Modes of operation display (Obj. 6061h)] will not change. To switch
the control mode even if the motor is not in zero speed state, set [Pr. PC76.1] to "1" to disable the monitoring of zero speed
state. When the monitoring of zero speed state is disabled, a shock may occur at control switching.
Index
Sub
Object
Name
Data Type
Access
Description
6060h
VAR
Modes of operation
I8
rw
0: No mode change/No mode assigned
1: Profile position mode (pp)
3: Profile velocity mode (pv)
4: Profile torque mode (tq)
6: Homing mode (hm)
8: Cyclic sync position mode (csp)
9: Cyclic sync velocity mode (csv)
10: Cyclic sync torque mode (cst)
6061h
VAR
Modes of operation display
I8
ro
0: No mode assigned
1: Profile position mode (pp)
3: Profile velocity mode (pv)
4: Profile torque mode (tq)
6: Homing mode (hm)
8: Cyclic sync position mode (csp)
9: Cyclic sync velocity mode (csv)
10: Cyclic sync torque mode (cst)
6502h
VAR
Supported drive modes
U32
ro
Bit =1 for the following modes
bit 0: Profile position mode
bit 2: Profile velocity mode
bit 3: Profile torque mode
bit 5: Homing mode
bit 7: Cyclic sync position mode
bit 8: Cyclic sync velocity mode
bit 9: Cyclic sync torque mode
Summary of Contents for MELSERVO-J5 MR-J5-G-N1
Page 2: ......
Page 24: ...22 6 SYNCHRONIZATION 6 2 Synchronous mode DC mode MEMO ...
Page 47: ...9 MANUFACTURER SPECIFIC FUNCTION 9 1 Torque limit selection 45 9 MEMO ...
Page 51: ......







































































