
























8
2 EtherCAT COMMUNICATION
2.1 Communication specifications
2
EtherCAT COMMUNICATION
2.1
Communication specifications
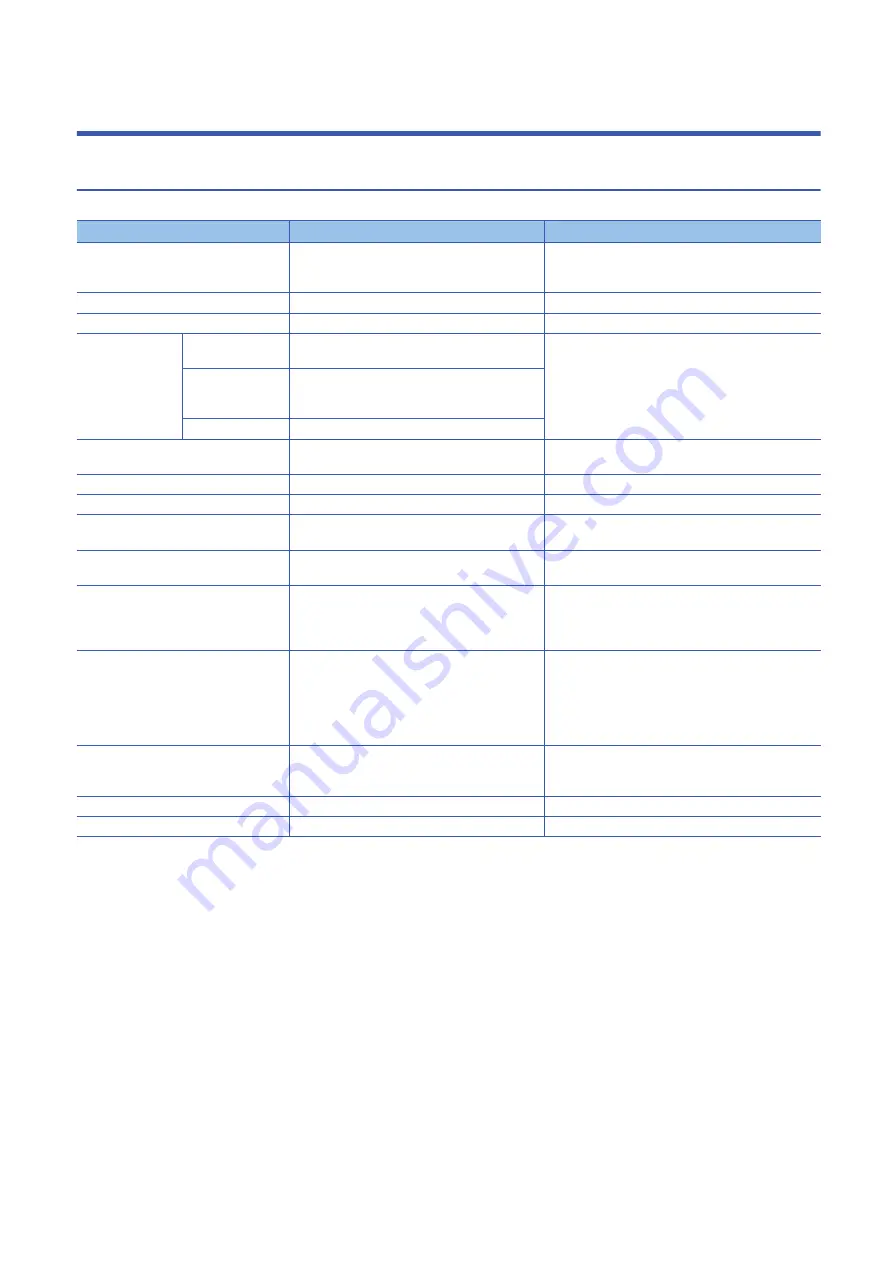
The communication specifications are shown in the following table.
*1 There are restrictions on the communication cycle depending on the function used. For details, refer to "Function restrictions" in the
following manual.
MR-J5-G-N1/MR-J5W-G-N1 User's Manual (Introduction)
Item
Description
Remark
EtherCAT communication specifications
IEC 61158 Type12
CAN application protocol over EtherCAT (CoE), IEC
61800-7 CiA 402 Drive Profile
Physical layer
100BASE-TX (IEEE802.3)
Communication connector
Two RJ45 ports (IN port and OUT port)
Communication
cable
Cable type
Category 5e or higher, (double shielded/STP)
straight cable
Standard
One of the following standards must be met.
• IEEE802.3 100BASE-TX
• ANSI/TIA/EIA-568-B (Category 5e)
Connector
RJ-45 shielded connector
Network topology
Line, Tree, Star, or Hybrid of these three topology
types
Communication speed
100 Mbps (Full duplex)
Transmission distance between stations
Max. 100 m
Number of connection nodes
Max. 65535
The number of connection nodes for actual use varies
depending on the specifications of the master controller.
SDO (Mailbox) communication
Asynchronous communication
Sending/Receiving: 1 channel each
Maximum data size in sending/receiving:
1486 bytes per channel
PDO (Process Data) communication
Cycle time: Select from 0.125 ms, 0.25 ms, 0.5 ms, 1
ms, 2 ms, 4 ms, or 8 ms.
Receive PDO (RxPDO): 1 channel
Send PDO (TxPDO): 1 channel
Multi-axis servo amplifiers do not support a
communication cycle of 0.125 ms.
PDO mapping
The servo amplifiers support variable PDO mapping.
• Maximum sizes of RxPDO and TxPDO
• Maximum number of object mappings
MR-J5-_G_-_N1: 32
MR-J5W2-_G-N1: 64
MR-J5W3-_G-N1: 96
Distributed clock (DC)
DC mode or Free-run mode can be selected.
Sync0: Set the same cycle as the PDO communication
cycle
Sync1: Not used
Explicit Device Identification
Supported
LED display
RUN, ERROR, LINK/Activity (IN, OUT)
Summary of Contents for MELSERVO-J5 MR-J5-G-N1
Page 2: ......
Page 24: ...22 6 SYNCHRONIZATION 6 2 Synchronous mode DC mode MEMO ...
Page 47: ...9 MANUFACTURER SPECIFIC FUNCTION 9 1 Torque limit selection 45 9 MEMO ...
Page 51: ......







































































