





























Configuration
General information about the system bus (CAN)
Addressing of the parameter and process data objects
94
EDBCSXE040 EN 6.0
8.1.5
Addressing of the parameter and process data objects
The CAN bus system is based on a message−oriented data exchange between a transmitter
and many receivers. Thus, all nodes can transmit and receive messages at the same time.
The identifier in the CAN telegram ˘ also called
COB−ID (Communication Object Identifier)
controls which node is to receive a transmitted message. With the exception of the
network management (NMT) and the sync telegram (Sync) the identifier contains the
node address of the drive besides the basic identifier:
Identifier (COB−ID) = basic iden adjustable node address (node ID)
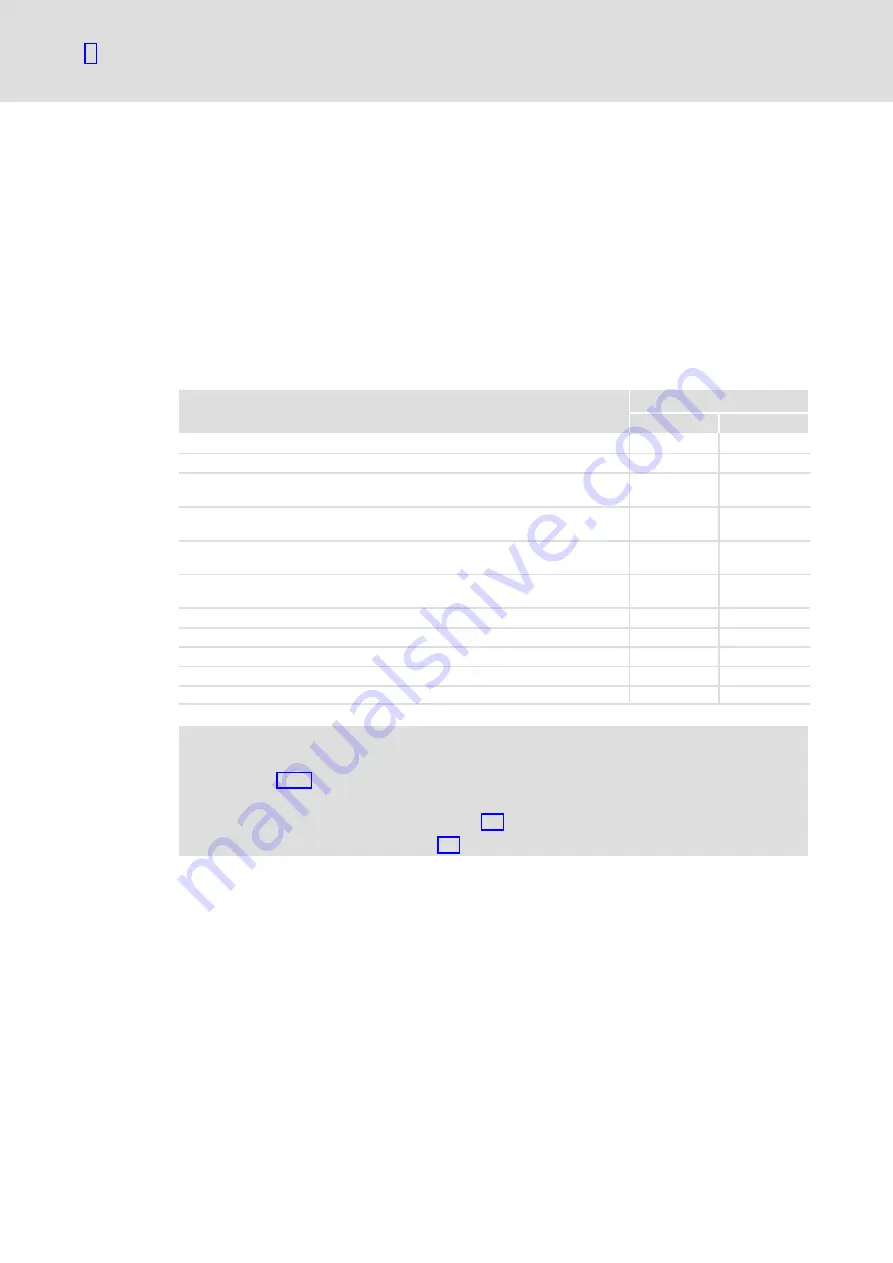
The basic identifier for the ECSxE power supply module is preset ex works with the
following values:
Object
Basic identifier
dec
hex
Network management (NMT)
0
0
Sync telegram
128
80
Process data channel to ECSxE in cyclic operation (sync−controlled)
(RPDO: CAN1_IN)
512
200
Process data channel from ECSxE in cyclic operation (sync−controlled)
(TPDO: CAN1_OUT)
384
180
Process data channel to ECSxE in event−controlled/cyclic operation without sync
(RPDO: CAN3_IN)
768
300
Process data channel from ECSxE in event−controlled/cyclic operation without
sync (TPDO: CAN3_OUT)
769
301
Parameter data channel 1 to ECSxE (SDO1)
1536
600
Parameter data channel 2 to ECSxE (SDO2)
1600
640
Parameter data channel 1 from ECSxE (SDO1)
1408
580
Parameter data channel 2 from ECSxE (SDO2)
1472
5C0
Node Guarding
1792
700
Note!
The "8.2.1 Setting of CAN node address and baud rate" chapter contains
information on
ƒ
Setting of the node address (
ƒ
Individual addressing (







































































