


























GB 26
GB
With this type of setpoint selection it is permissible to set several
inputs at the same time. The table below shows which travelling
speeds are used.
Symbole:
1 =
Input is set at 24 V
0 =
Input may not be set
X =
Setting has no effect
Function of the digital setpoint inputs
X3.2
X3.3
X3.4
V = 0
0
0
0
VB
1
0
0
VE
0
1
0
VN
1
1
0
VI
0
0
1
V1
1
0
1
V2
0
1
1
V = 0
1
1
1
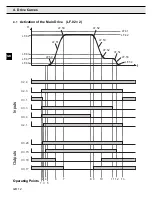
b)
Input coded
setpoint selection
LF.02 = 2
8. Parameter
Description
The analog setpoint selection is set with the terminals
X2.14 / X2.15.
0 ... ±10V = 0 ... ±max. system speed (LF.20)
Terminal X3.6 is used to activate/deactivate the starting
routine. The directions below must be followed in the exact
sequence they are listed:
Start: 1.) Terminal X3.6 = 1
(activate starting routine/open break
)
2.) Preset analog setpoint
Stop: 1.) Remove analog setpoint
2.) Terminal X3.6 = 0
(close brake)
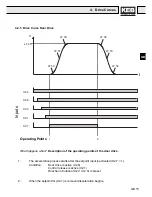
c)
Analog setpoint selection
LF.02 = 3 or 4
X3.2
X3.3
X3.4
X3.5
X3.6
X3.7
X3.8
V = 0
0
0
0
0
0
0
0
VB
1
X
X
X
X
X
X
VE
0
1
0
0
0
0
0
VN
0
X
1
0
0
0
0
VI
0
X
X
1
0
0
0
V1
0
X
X
X
1
0
0
V2
0
X
X
X
X
1
0
V=0
0
X
X
X
X
X
1
First all three inputs should be set and then the non-
needed inputs should be reset to avoid a wrong speed
selection during a speed change.
Summary of Contents for COMBIVERT F4-F
Page 65: ...ANTRIEBSTECHNIK...







































































