




























TITAN GO Product Manual |
Wiring and Connections
INGENIA | 2022-07-14 08:35:14
66
Specification
Value
1st order filter cutting frequency (-3 dB)
6 MHz
Maximum readable pulse frequency
30 MHz
Termination resistor
470
Ω
(between ENC_x+ and ENC_x-)
Bias resistors
ENC_x- (negative input) 1 k
Ω
to 3.3 V (equivalent)
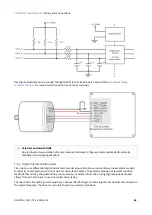
The encoder interface accepts an RS-422 differential quadrature line driver signal in the range of 0 V to 5 V, up to 10
MHz.
for more information about connections and wires.
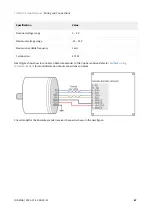
7.5.3 Absolute encoder interface
The Titan Go has an Absolute encoder connector that can be used as position and velocity feedback element. This
sensor generates digital data that represent the encoder actual position. From the position information, speed and
direction of motion is calculated. The position is not lost even if the encoder is powered down, this means it is not
necessary to move to a reference position as with incremental type encoders.
Next table shows the absolute encoder inputs electrical specifications.
Specification
Value
Type of inputs
Non-isolated. Differential. ESD protected
ESD capability
IEC 61000-4-2 (ESD) ± 15 kV (air), ± 8 kV (contact)
Number of inputs
2 (CLK and DATA_IN)
Summary of Contents for Titan GO
Page 19: ...TITAN GO Product Manual Product Description INGENIA 2022 07 14 08 35 14 19 ...
Page 56: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 56 ...
Page 89: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 89 ...
Page 101: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 101 ...







































































