





























50
C13UE001-1903
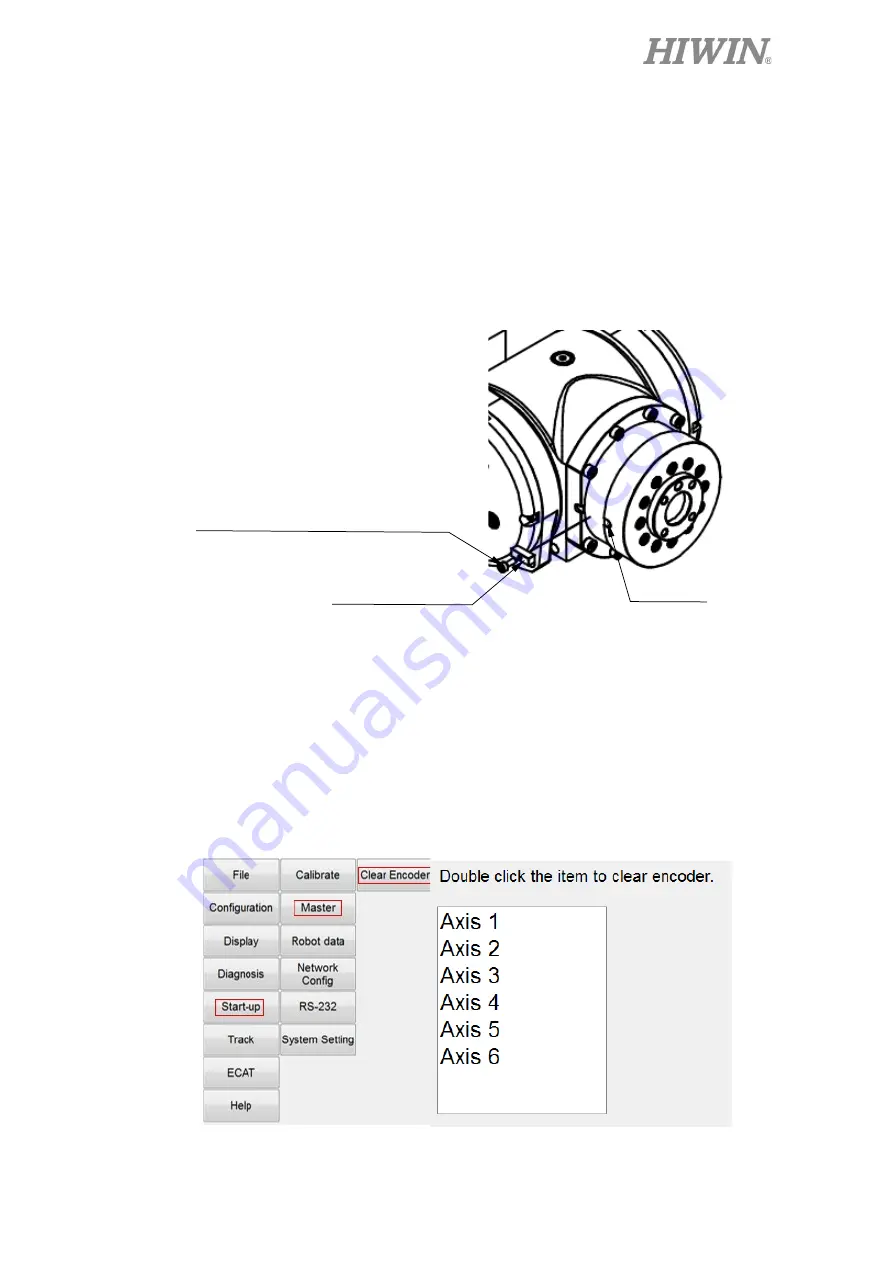
J6-axis Zero-position setting
Step1.
Operate J6 at low speed to align the calibration mark with the keyway.
Step2.
Insert the calibration tool(B) to the keyway to calibrate Zero-position. (The
hexagon socket screw can be secured to the calibration tool(B) in advance.)
Step3.
Finish calibration and remove the calibration tool(B) by using the hexagon
socket screw.
Step4.
Clear encoder by HRSS. (Refer to page 53)
Step5.
Zero-position setting of J6 axis is completed.
Figure 4-7 Illustration of J6-axis Zero- position setting
Clear encoder by HRSS
Step1.
Select the “JOINT” as the coordinate system.
Step2.
Move the robot to the Zero-position. (Refer to section 4-1)
Step3.
Click Main Menu>>Start-up>>Master>>Clear Encoder. (As shown in
Figure 4-8)
Step4.
Double click the axis to clear encoder. (As shown in Figure 4-8)
Figure 4-8 Clear encoder by HRSS
Calibration tool(B)
Keyway
Hexagon socket head cap screw
M3
×
0.5P
×
8L(Nylok)







































































