




SJ200 Inverter
Conf
igur
ing
Dr
iv
e P
a
ra
m
e
ters
3–49
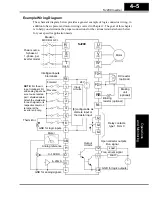
The Error for the PID loop is the magni-
tude (absolute value) of the difference
between the Setpoint (desired value) and
Process Variable (actual value). The PID
output deviation signal [OD] (output
terminal function option code 04)
indicates when the error magnitude has
exceeded a magnitude you define.
PID Error (PV–SP) deviation threshold
Deviation
signal
t
t
SP
Output
PV
0
1
0
C044
“C” Function
Run
Mode
Edit
Defaults
Func.
Code
Name /
SRW Display
Description
–FEF
(EU)
–FU
(USA)
Units
C041 Overload level setting
Sets the overload signal level
between 0% and 200% (from 0
to two times the rated current
of the inverter)
✘
Rated current
for each
inverter model
A
OL LVL 001.60A
C042 Frequency arrival
setting for acceleration
Sets the frequency arrival
setting threshold for the output
frequency during acceleration,
range is 0.0 to 400.0 Hz
✘
0.0
0.0
Hz
ARV ACC 0000.0Hz
C043 Arrival frequency
setting for deceleration
Sets the frequency arrival
setting threshold for the output
frequency during deceleration,
range is 0.0 to 400.0 Hz
✘
0.0
0.0
Hz
ARV DEC 0000.0Hz
C044 PID deviation level
setting
Sets the allowable PID loop
error magnitude (absolute
value), SP - PV, range is 0.0 to
100%, resolution is 0.1%
✘
3.0
3.0
%
ARV PID 003.0%
C052 PID FBV function
high limit
When the PV exceeds this
value, the PID loop turns OFF
the PID Second Stage Output,
range is 0.0 to 100.0%
✘
100.0
100.0
%
PID LtU 0100.0%
C053 PID FBV function
variable low limit
When the PV goes below this
value, the PID loop turns ON
the PID Second Stage Output,
range is 0.0 to 100.0%
✘
0.0
0.0
%
PID LtL 0000.0%