


























Instruction Manual PSE2xxDN
12
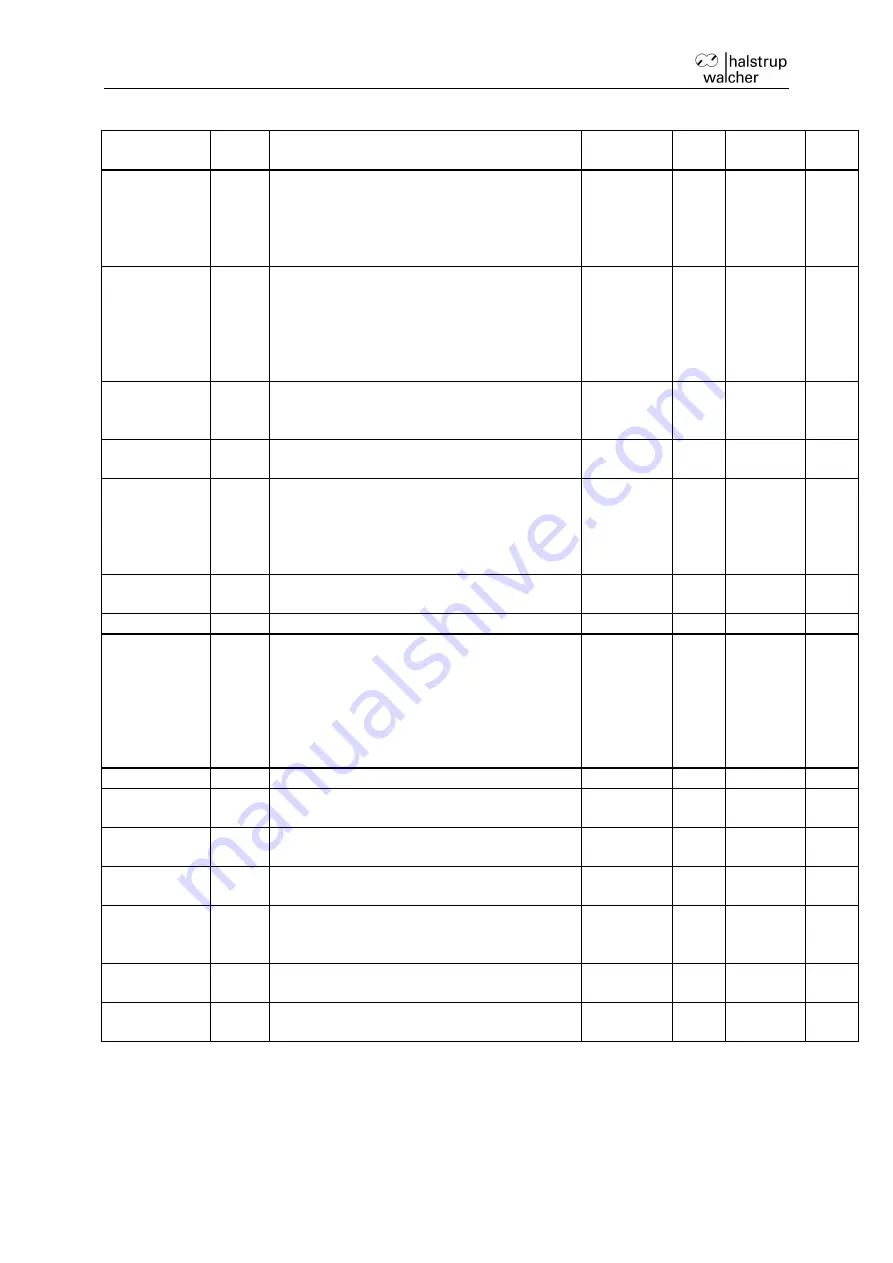
Name
Attr.
No.
Function
Range of
value
Back
up
Delivery
State
R/W
baud rate
39
0: 125 kBaud 1: 250 kBaud
2: 500 kBaud
This value cannot be changed if the baud
rate switch is used (i.e. the switch setting
is not ON-ON).
0...2
8 bit
yes
0
R/W
upper
mapping end
40
definition of the positioning range relative
to the absolute measuring system
allowed values:
(1 + ref.value)
… (54400 *
denominator / numerator - 1 + ref.value)
(object exists only in multiturn variants)
31 bit
yes
27200
R/W
position
consistent
42
0: position is not consistent
1: position is consistent
(object exists only in singleturn variants)
0 or 1
8 bit
1
R
direction of
rotation
44
0: clockwise (as seen at the output shaft)
1: counter-clockwise
0 or 1
8 bit
yes
0
R/W
running
direction for
approaching
target
positions
45
0: with 5/8 forward rotation
1: with 5/8 reverse rotation
(5/8 rotations is the default value, see
attr. 31)
0 or 1
8 bit
yes
0
R/W
idle period
46
idle period in msec when reversing the
direction of rotation
10...10000
16 bit
yes
10
R/W
actual rpm
48
value in rpm
16 bit
R
maximum
torque
49
maximum torque occurring during the
most recent run (start phase, during
which the maximum start-up torque
applies, see attr. 24/25, and the phase
when the drive is braking down, are not
considered)
value in cNm
16 bit
R
actual torque 51
value in cNm
16 bit
R
U control
58
current supply voltage for control unit
given in increments of 0.1 V
16 bit
R
U motor
59
current supply voltage for motor given in
increments of 0.1 V
16 bit
R
Umot limit
60
voltage limit for
bit ‘motor power present’
given in increments of 0.1 V
180...240
16 bit
yes
185
R/W
Umot filter
61
average time for measuring current
power to motor; given in 5 msec
increments
100...
1000
16 bit
yes
100
R/W
temperature
limit
62
upper temperature limit in °C
10...70
16 bit
yes
70
R/W
device
temperature
63
internal device temperature in °C
16 bit
R























































