





























English (GB)
17
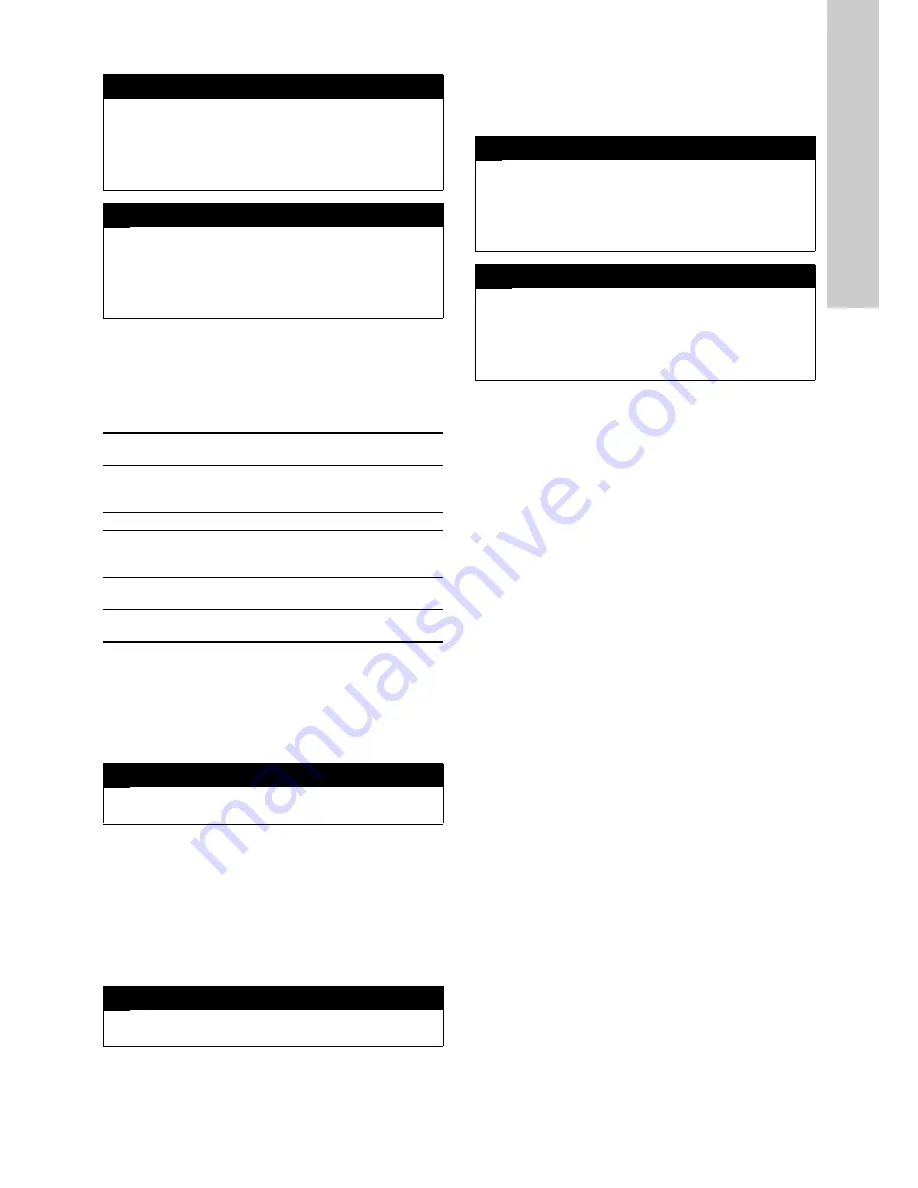
9.4 Controllers / settings
In the controller settings menu, the setpoint can be defined
(Setpoint…), the controller parameters can be configured
(Settings PID/2-P…), the input for the controller can be chosen
(Source), the output for the controller value can be chosen
(Output), the digital output can be configured (Output settings…),
the Alarms can be configured (Alarm settings…) and it is also
possible to reset the state of the controller (Reset state).
9.4.1 Setpoint
The setpoint of the controller can either be defined directly in the
operating software of the controller or it is possible to configure
an external setpoint adjustment. Such a setpoint can be
controlled by an analog or digital input.
Two different kinds of types of setpoint adjustment (Manual,
External) can be defined.
To change setpoint to type Manual select Type with [Up]- and
[Down] buttons and by pressing [OK] button the type can be
changed with [Up]-, [Down] button to Manual. Pressing [OK]
button will confirm the type of the setpoint.
To change setpoint of the controller select Setpoint with [Up]- and
[Down] buttons and by pressing [OK] button the setpoint can be
changed with [Up]-, [Down]-, [Left]- and [Right] button. Pressing
[OK] button will confirm the setpoint.
The unit of this setpoint is defined by the parameter that is used
as an input.
To change the setpoint to type External select Type with [Up]- and
[Down] buttons and by pressing [OK] button the type can be
changed with [Up]-, [Down] button to External. Pressing [OK]
button will confirm the type of the setpoint.
To change the source for the external setpoint select Source with
[Up]- and [Down] buttons and by pressing [OK] button the source
can be changed with [Up]-, [Down]-, [Left]- and [Right] button.
Pressing [OK] button will confirm the source.
9.4.2 Settings PID
To change the type of the controller select Type with [Up]- and
[Down] buttons and by pressing [OK] button the type can be
toggled between PID, 2-P or none with [Up]-, [Down] buttons.
Pressing [OK] button will confirm the type.
None as a type will deactivate the controller.
Kp [%] is the proportional part of the PID-controller with a range
of 0 % - 100 %. The unit of this parameter is [%].
To change the proportional part of the PID-controller select Kp
[%] with [Up]- and [Down] buttons and by pressing [OK] button
the proportional part can be changed with [Up]-, [Down]-, [Left]-
and [Right] button. Pressing [OK] button will confirm the new
value for Kp.
Ti [s] is the integral part of the PID-controller with a range of 1 s -
3000 s. The unit for this parameter is [s].
To change the integral part of the PID-controller select Ti [s] with
[Up]- and [Down] buttons and by pressing [OK] button the integral
part can be changed with [Up]-, [Down]-, [Left]- and [Right]
button. Pressing [OK] button will confirm the new value for Ti.
To disable the integral part of the PID-controller select Ti [s] with
[Up]- and [Down] buttons and by pressing [OK] button,
then [Function] button and [OK] button again will disable Ti. The
displayed value for Ti [s] will be ++++++.++.
Td [s] is the derivative part of the PID-controller with a range of 0
s - 1000 s. The unit of this parameter is [s].
To change the derivative part of the PID-controller select Td [s]
with [Up]- and [Down] buttons and by pressing [OK] button the
derivative part can be changed with [Up]-, [Down]-, [Left]- and
[Right] button. Pressing [OK] button will confirm the new value for
Td.
To disable the derivative part of the PID-controller select Td [s]
with [Up]- and [Down] buttons and by pressing [OK] button,
then [Function] button and [OK] button again will disable Td. The
displayed value for Ti [s] will be 0.00.
If Stop on Error is Yes the controller will stop if a sensor device
error occurs. The status of the controller changes to Stopped.
To change the behaviour of the controller when an error occurs,
select Stop on Error with [Up]- and [Down] buttons and by
pressing [OK] button Yes and No can be toggled with [Up]- and
[Down] buttons. Pressing [OK] button confirms the new
behaviour.
If Stop on Alarm is Yes the controller will stop if an Alarm occurs.
The status of the controller changes to Stopped.
The Alarm limits can be set in the Alarm menu found in the
Parameter menu.
To change the behaviour of the controller when an alarm occurs,
select Stop on Alarm with [Up]- and [Down] buttons and by
pressing [OK] button Yes and No can be toggled with [Up]- and
[Down] buttons. Pressing [OK] button confirms the new
behaviour.
∨
C2 pH/
►
Setpoint:
Settings PID...
Source:
pH
Output:
DigOut #1
Output settings....
∨
C2 pH/
∨
►
Source:
pH
Output DI/mA
DigOut #1
Output settings...
Alarm settings:::
Reset state
Setpoint...
In this submenu the setpoint of the controller can
be set (see section
9.4.1 Setpoint
).
Settings
PID/2-P...
In this submenu the parameter for the PID (see
section
9.4.2 Settings PID
) or 2-P (see section
9.4.3 Settings 2-P
) controller can be configured.
Source:
Defines the input / (feedback) of the controller.
Output
settings...
In this submenu the output for the controller can be
configured. This submenu is only visible if a digital
output is defined.
Alarm
settings...
In this submenu the alarms for this controller can
be configured.
Reset state
With this function the state of the controller will be
set to 0.
∨
C2 Setpoint
►
Type:
Manual
Setpoint:
7.00
∨
C2 Setpoint
►
Type:
External
Source:
4/20 mA #1
∨
C2 Settings
►
Type:
PID
Kp [%]:
5.0
Ti [s]:
200.00
Td [s]:
0.00
Disturb:
DI 1
∨ ∧
C2 Settings
►
Td [s]:
0.00
Disturb:
DI 1
D. factor:
50.0
Direction:
up
Deadband
0.05







































































