





























55
9. Réglage du système gyroscopique à 3 axes
Page P.12
1. Sélection du modèle réduit
Si l’émetteur de votre télécommande permet de basculer entre hélicoptères et modèles réduits surfaciques, sélectionnez le
type de modèle réduit « Modèle réduit d’avion » étant donné que le Quadrocopter ne nécessite aucune fonction mixte côté
émetteur.
2. Sélection des fonctions directionnelles
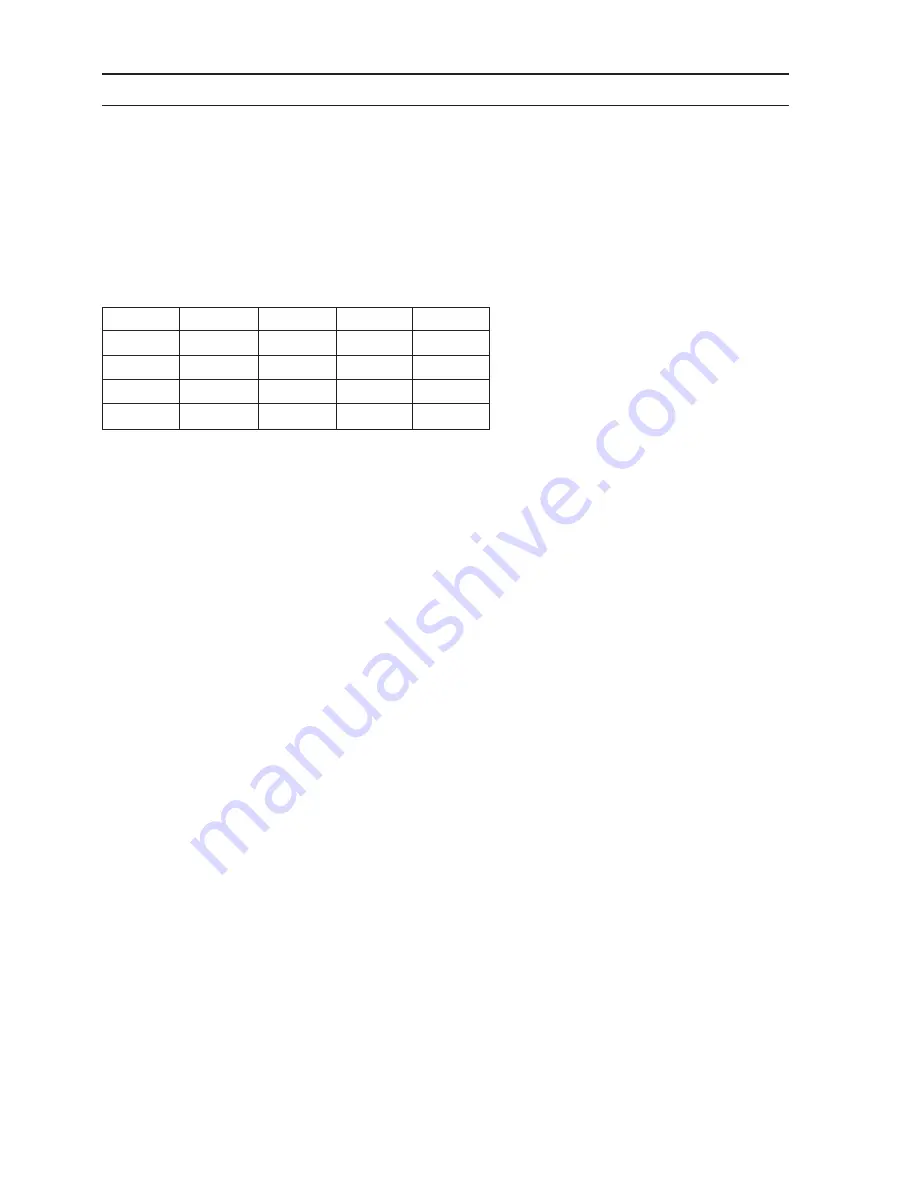
Si vous utilisez l’un des émetteurs indiqués dans le tableau, vous pouvez, maintenant déjà, définir la fonction directionnelle
des quatre canaux de commande (NOR = sens normal ; REV = sens inverse).
GAUI
Futaba
JR
Hitech
AILE
NOR
NOR
REV
NOR
ELEV
NOR
NOR
REV
REV
THRO
REV
REV
NOR
NOR
RUDD
NOR
NOR
REV
NOR
Si vous utilisez un émetteur d’un autre fabricant, vous devez effectuer des essais pratiques afin de déterminer les fonctions
directionnelles.
3. Possibilités de réglage sur le système gyroscopique à 3 axes GU-344 GYRO
Le système gyroscopique à 3 axes GU-344 GYRO se règle soit à l’aide d’un bouton de réglage et d’interrupteurs DIP soit à
l’aide de la télécommande.
a) Réglage manuel du GU-344 GYRO
Si la fiche du câble de raccordement vert n’est pas branchée sur le récepteur, le bouton de réglage « A » et l’interrupteur
DIP « 1 » sur le GU-344 GYRO sont activés.
• Tournez le bouton de réglage « A » de la gauche (minimum) de 90° vers la droite pour définir le réglage de base de la
sensibilité du gyroscope pour les premiers essais de vol. Pour ce faire, utilisez un tournevis miniature approprié. Plus vous
tournez le bouton rotatif vers la droite, plus l’effet stabilisateur du gyroscope à 3 axes est important.
Le système gyroscopique à 3 axes GU-344 GYRO est également équipé de 2 différents réglages de vol qui se sélectionnent
à l’aide de l’interrupteur DIP « 1 ».
• Si l’interrupteur DIP « 1 » est commuté en position haute « CRU » à l’aide d’un tournevis miniature, la DEL de contrôle
passe au rouge et le Quadrocopter se comporte comme un modèle réduit d’hélicoptère normal. Ce réglage est recommandé
pour les pilotes expérimentés de modèle réduit d’hélicoptère.
• Si l’interrupteur DIP « 1 » est commuté en position haute « HOV », la DEL de contrôle passe au vert et le Quadrocopter
constitue alors un choix idéal pour les débutants qui souhaitent apprendre le vol stationnaire. Avec ce réglage, le système
gyroscopique à 3 axes atténue légèrement les signaux de commande de l’émetteur et une part exponentielle y est ajoutée
(voir diagrammes au centre de la page P.12). Cela permet de piloter le Quadrocopter avec une plus grand précision en vol
stationnaire.
L’interrupteur DIP « 2 » permet de définir deux différents alignements de vol du Quadrocopter.
• Si l’interrupteur DIP « 2 » est commuté en position haute, l’alignement de vol X est activé. Dans le sens de vol, le centre
entre les bras 1 et 4 du balancier du moteur, là où la bille de l’indicateur de direction de vol est montée, se situe à l’avant.
• Si l’interrupteur DIP « 2 » est commuté en position basse, l’alignement de vol Croix est activé. Si le système gyroscopique
à 3 axes GU-344 GYRO est également décalé de 45°, le bras du balancier 1 se trouve à l’avant dans le sens de vol (voir
également page P.16).







































































