
























3-5
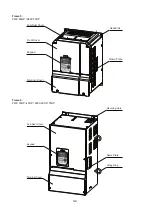
3.4 Warning Labels
Important:
Warning information located on the front cover must be read upon installation of the AC Drive.
240V 0.5HP–20HP / 480V 1HP–25HP
240V 25HP–40HP / 480V 30HP–75HP
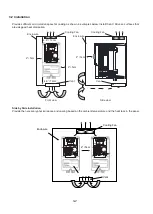
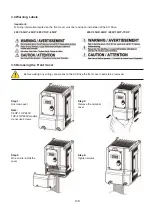
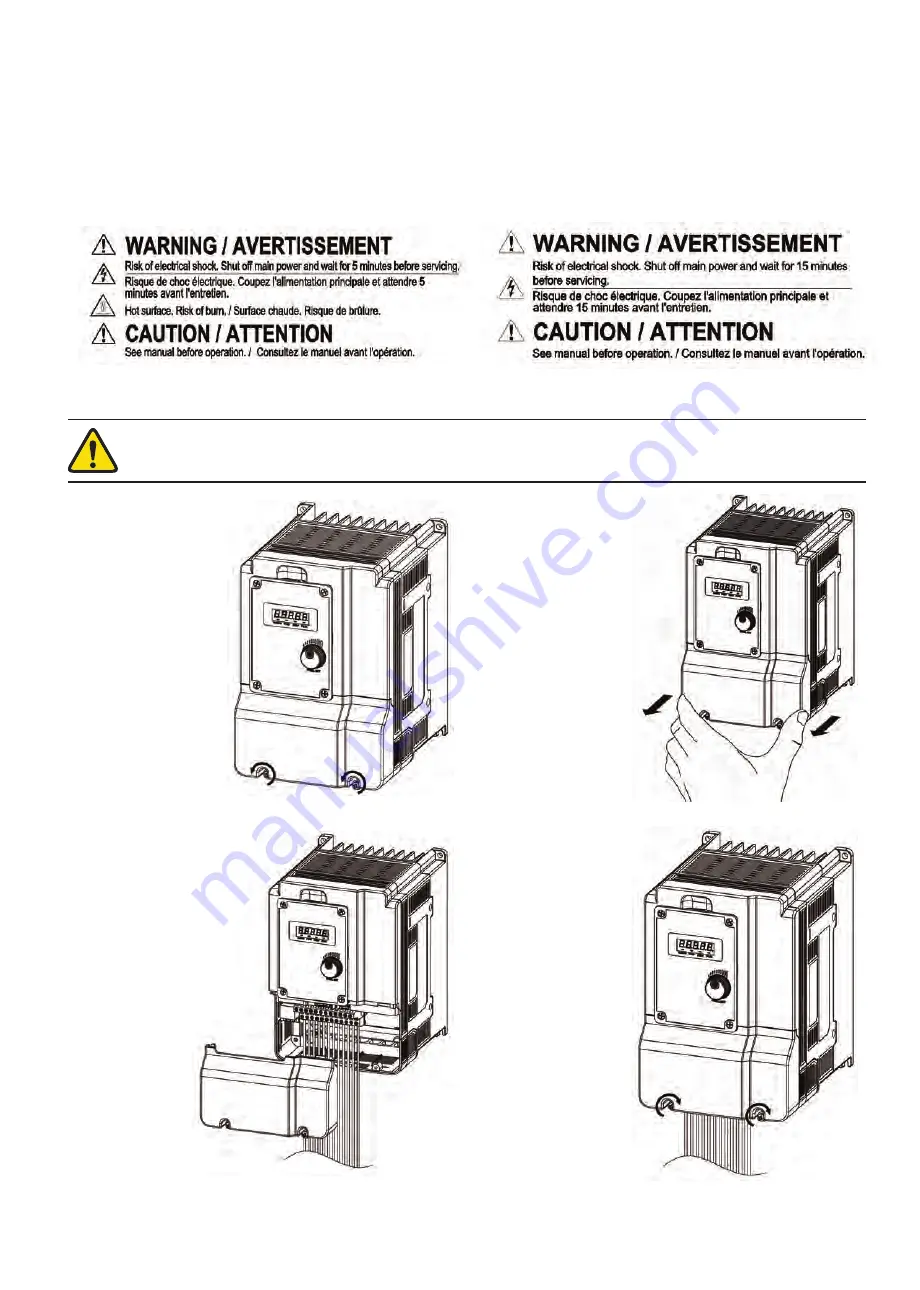
3.5 Removing the Front Cover
Before making any wiring connections to the AC Drive the front cover needs to be removed.
Step 1:
Unscrew cover
Note:
0.5HP–1HP 240V,
1HP–2HP 480V models
do not use screws.
Step 2:
Remove the terminal
cover
Step 3:
Wire and re-install the
cover
Step 4:
Tighten screws