





























4-162
9) If tuning (20-00 to 20-03) and the low-pass filter time constant (20-13 to 20-14) do not improve system response
time, tuning the PI gain (20-09 to 20-12) of the speed estimator may be required.
10) Setting a high gain for the speed estimator (high proportion (P) gain and small integral (I) time) increases the
bandwidth of the speed feedback, but may cause speed feedback interference resulting in system instability.
11) Setting a low gain for the speed estimator (small proportion (P) gain and high integral (I) time) decreases the
bandwidth of the speed feedback, may improve speed feedback interference resulting in a more stable system.
12) The default values for the ASR can be used in most applications, no adjustment required. Adjusting the low-pass
filter time and speed estimator gain requires a good understanding of the overall system. If a high-speed system
response in combination with stable operation is required consider using SLV control mode.
13) Parameter 20-15 sets the gain switch frequency at low-speed and parameter 20-16 sets the gain switch
frequency at high-speed.
14) Operating at a speed below 20-15 will result in an increased excitation current for low-speed operation accuracy.
When the frequency reference rises above 20-16, the AC Drive will output the rated excitation current at the
no-load voltage (02-19).
15) For general purpose applications parameter 20-15 should be set to a value of 5–50% of the motor base
frequency. If this value is too high, the AC Drive output may saturate. Parameter 20-16 should be set to a value of
4Hz or more above value of 20-08.
16) When experiencing speed jitter at high speed and stable operation during mid-range speed while operating a
heavy load (>100%), it is recommended to reduce the no-load voltage (02-19) or tune the FOC parameters
(18-05 to 18-06).
17) Parameters 20-17 and 20-18 are for compensating speed feedback at low speed and high speed.
18) Use parameter 20-17 to adjust the torque compensation gain for the low speed range. By tuning 20-17 an offset
is added to the torque-speed curve. Increase 20-17 when the no-load speed is lower than the frequency
reference. Decrease 20-17 when the no-load speed is higher than the frequency reference.
The effect on the speed-torque curve from 20-17 is shown in the following figure
Decrease 20-17 Increase 20-17
Torque
Speed
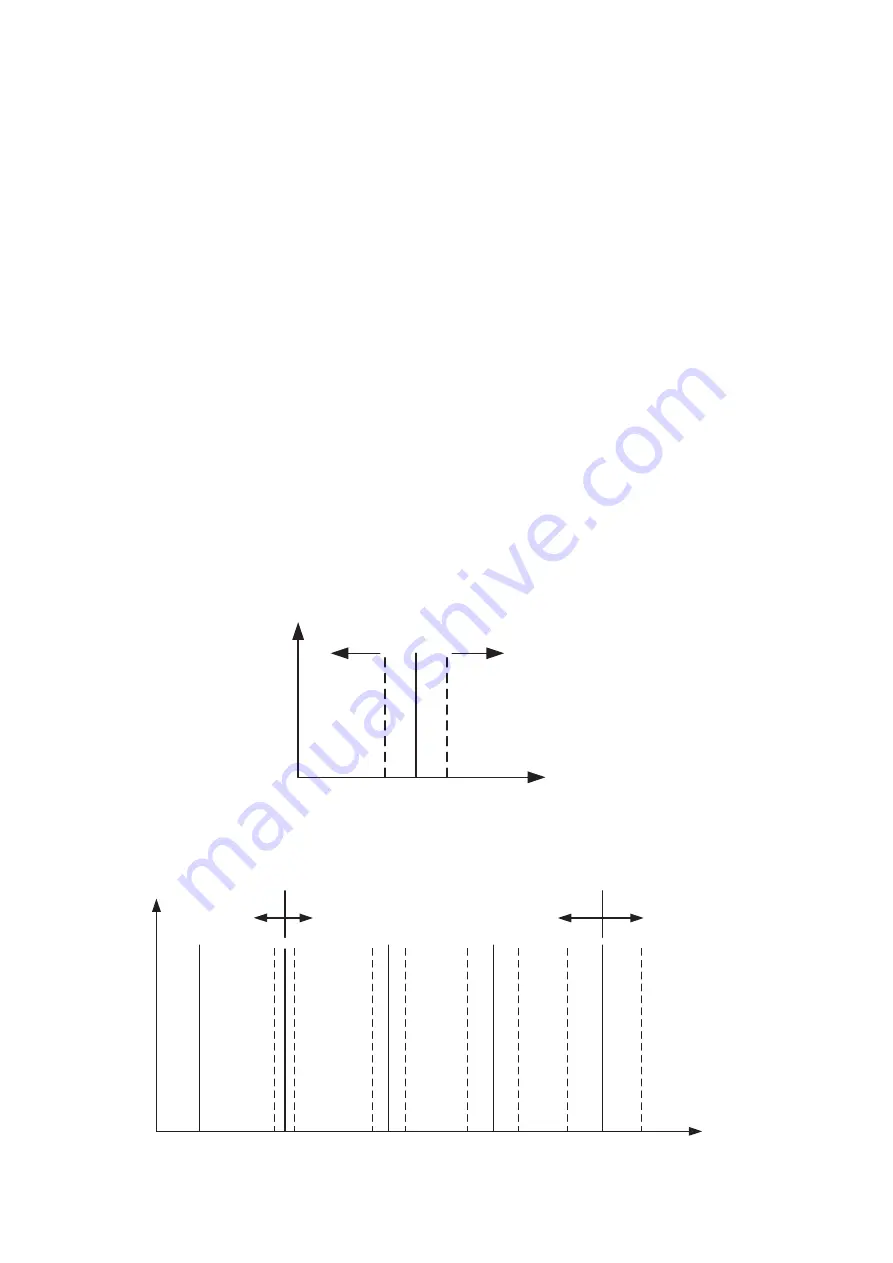
Use parameter 20-18 to adjust the torque compensation gain for medium to high speed range. For most general
purpose applications it is not necessary to adjust the 20-18. The effect on the speed-torque curve by parameter
20-18 is shown in figure below.
Torque
Speed
Decrease
20-18
Increase
20-18
Decrease
20-18
Increase
20-18