





























Model 5601MSC
Model 5601MSC Master SPG/Master Clock System
Page - 36
Revision 2.2
OPERATION
The GPS receiver also provides highly accurate time. The 5601MSC uses the time information to set
the phase of all outputs. This is done by choosing a moment in GPS time when all standards started at
their initial phase. By working backwards to that moment, the instantaneous phase of any standard can
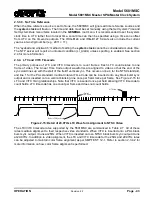
be determined for any point in time. This allows true deterministic cross-standard phasing. See Figure
2-13 for the timing relationship between multiple standards when locked to GPS.
Because the 5601MSC uses GPS time to determine the phase of the outputs, the
time reference will be forced to use GPS, regardless of the time Reference Src
menu item setting.
Using GPS as a frequency reference is the only way to guarantee that all outputs across multiple
standards will be phased to each other across multiple units. Furthermore, when two 5601MSC units
are separated by a large distance, using GPS receivers can assure they will be phased to within 100ns
of each other. Note than when using multiple units the antenna cable lengths should be matched as
closely as possible to eliminate any cable length propagation delay effects that may cause phase errors
between them.
If the GPS receiver is unplugged, or if the number of satellite signals being received drops to 0, the
5601MSC will free-run on its high stability OCXO. The
Lock type
menu item controls how the unit will
respond when the GPS signal is restored (see section 2.5.3). When the unit first starts up, the phase of
its outputs are random until GPS lock is acquired. Refer to section 2.5.2 for more information on how
the 5601MSC locks when using the GPS receiver as a reference.
While GPS provides a convenient way to lock the 5601MSC in all standards simultaneously and ensure
extremely good frequency accuracy, there can be issues dealing with limited availability and phase
errors. A GPS reference can be described as a “soft” lock. As more satellite signals are discovered, the
phase accuracy of the GPS lock improves. However, there will always be some “wander” associated
with GPS lock due to uncontrolled variables such as atmospheric disturbances and terrestrial
interference. This can cause problems when two different units are locked to separate GPS receivers.
Under ideal conditions, with 8 satellite signals being received, the maximum wander in phase between
two units locked to two separate GPS antennas can be up to 15ns. This is greater than the duration of a
single sample of serial digital HD video which may cause problems for router installations that require
sample-accurate timing. During poor weather conditions, the satellite signal strength will drop which will
cause fewer satellite signals to be available for phase corrections. This is why mounting of the GPS
receiver is extremely critical in order to get the best phase locking performance. If the receiver does not
have a clear view of the sky or is subject to multipath interference due to reflections off buildings, the
phase wander between units can quickly climb to unacceptable levels. The unpredictability of such
variations can be difficult to troubleshoot so these characteristics must be taken into account during the
design phase of any system.
2.3.
TIMEKEEPING
The 5601MSC contains a
system clock
to keep track of time and date. The
stability
of this clock is
equal to the selected frequency reference. The
accuracy
of this clock is determined by the selected
time reference and lock mode. The 5601MSC can access time references through the GPS receiver,
modem dial-up, syncro connection to another 5601MSC, LTC input, SNTP, or VITC read from a black
burst reference. See section 2.3.3. The
system clock
should always be set to Coordinated Universal
Time (UTC). See section 2.3.2 for a note on UTC. Time zone offsets can be applied to the timecode
outputs to provide local time.