





























Digitax ST User Guide
91
Issue: 5
9.22 Homing mode
This section describes the method by which a drive seeks the home
position (also called, the datum, reference point or zero point).
Figure 9-10 shows the defined input objects as well as the output
objects. The user may specify the speeds, acceleration and the method
of homing. There is a further object named home offset, which allows the
user to displace zero in the user's coordinate system from the home
position.
There is no output data except for those bits in the statusword, which
return the status or result of the homing process and the demand to the
position control loops.
Figure 9-10 Homing mode function
By choosing a homing method the following behavior is determined: The
homing signal (positive limit switch, negative limit switch, home switch),
the direction of actuation and where appropriate the position of the index
pulse.
An encircled number in Figure 9-11 to Figure 9-18 indicates the code for
selection of this homing position. The direction of movement is also
indicated.
There are four sources of homing signal available: These are the
negative and positive limit switches, the home switch and the index
pulse from an encoder.
In the diagrams of homing sequences in Figure 9-11, the encoder count
increases as the axis's position moves to the right, in other words the left
is the minimum position and the right is the maximum position.
There are two digital inputs on the front of the EtherCAT interface that
can be used in Homing Mode, more information is given in the following
section.
9.22.1 General homing definitions
Method 1: Homing on negative limit switch and index pulse
Using this method as shown in Figure 9-11, the initial direction of
movement shall be leftward if the negative limit switch is inactive (here:
low). The home position shall be at the first index pulse to the right of the
position where the negative limit switch becomes inactive.
Figure 9-11 Homing on negative limit switch and index pulse
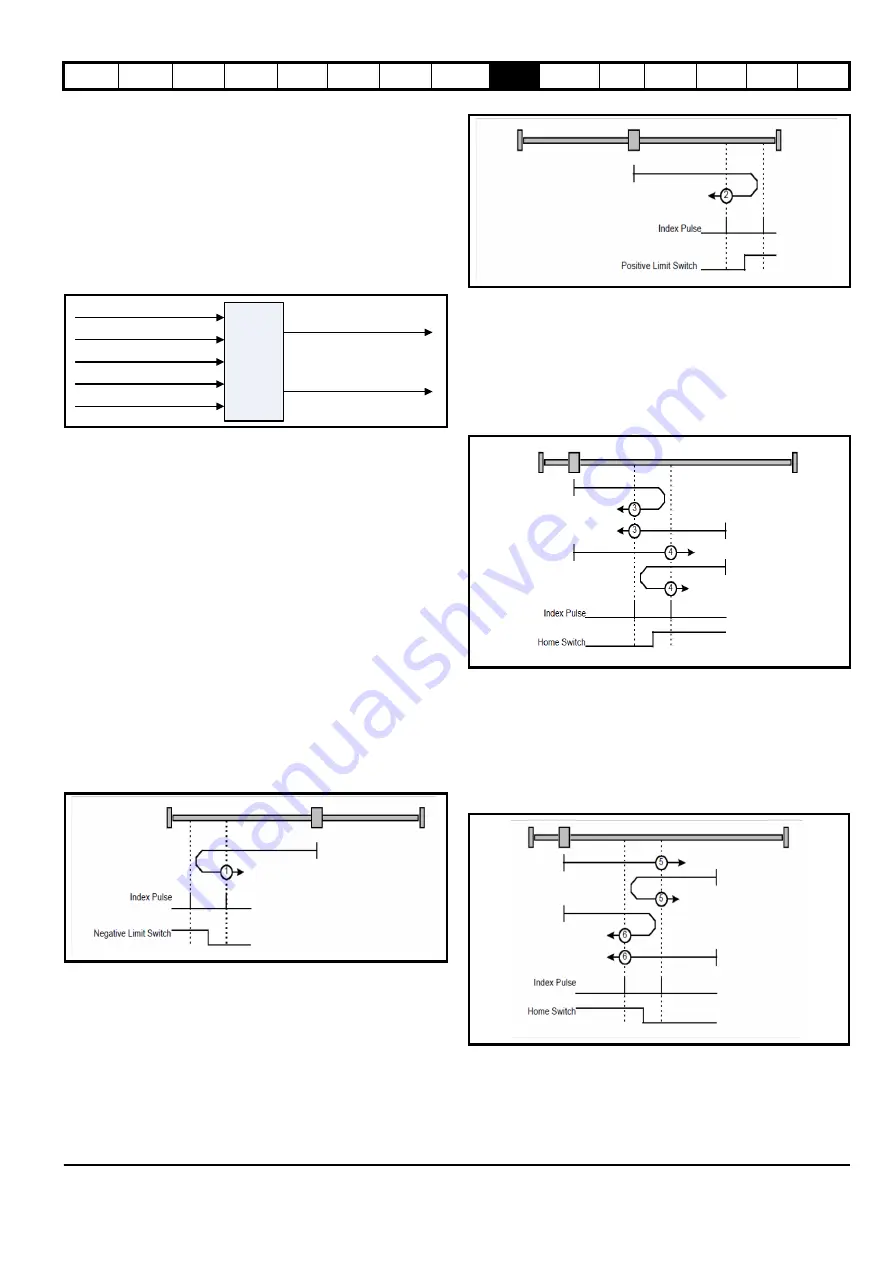
Method 2: Homing on positive limit switch and index pulse
Using this method as shown in Figure 9-12, the initial direction of
movement shall be rightward if the positive limit switch is inactive (here:
low). The position of home shall be at the first index pulse to the left of
the position where the positive limit switch becomes inactive.
Figure 9-12 Homing on positive limit switch and index pulse
Method 3 and 4: Homing on positive home switch and index pulse
Using these methods as shown in Figure 9-13, the initial direction of
movement shall be dependent on the state of the home switch.
The home position shall be at the index pulse either to the left or the right
of the point where the home switch changes state. If the initial position is
sited so that the direction of movement shall reverse during homing, the
point at which the reversal takes place is anywhere after a change of
state of the home switch.
Figure 9-13 Homing on positive home switch and index pulse
Method 5 and 6: Homing on negative home switch and index pulse
Using these methods as shown in Figure 9-14, the initial direction of
movement shall be dependent on the state of the home switch. The
home position shall be at the index pulse either to the left or the right of
the point where the home switch changes state. If the initial position is
sited so that the direction of movement shall reverse during homing, the
point at which the reversal takes place is anywhere after a change of
state of the home switch.
Figure 9-14 Homing on negative home switch and index pulse
Homing
method
Statusword (6041 )
h
Position demand value (6062 )
h
Controlword (6040 )
Homing method (6098 )
Homing Speeds (6099 )
Homing acceleration (609A )
Home offset (607C )
h
h
h
h
h
Summary of Contents for Digitax ST
Page 1: ...User Guide AC variable speed drive for servo motors Part Number 0475 0001 05 Issue 5 ...
Page 209: ......
Page 210: ...0475 0001 05 ...







































































