




























W
IRE
I
NSTALLATION
P
ERIPHERAL
W
IRE
21
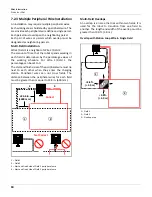
WATER DEFORMS THE
ELECTROMAGNETIC SIGNAL OF THE
PERIPHERAL WIRE
The robot can get confused on its location of the
electromagnetic signal is deformed.
•
Use an island or a pseudo-island to avoid a
water obstacle.
Install the peripheral wire a minimum distance of
5.5 ft. (1.5 m) from the edge of the water. Increase this
distance if the ground slopes towards the water, is slip-
pery, or can become wet or flooded.
If meeting the minimum distance of 5.5 ft. (1.5 m) is not
possible, install a physical barrier around the water.
Install the charging station a minimum of 49.0 ft.
(15.0 m) from the edge of the water.
Two possible installations for the charging station are
shown in the following figure.
NOTE:
The robot should return to the charging station
from the direction away from the water.
If the charging station is located at Point A, program the
robot to return to it in a clockwise direction.
If the charging station is located at Point B, program the
robot to return to it in a counterclockwise direction.
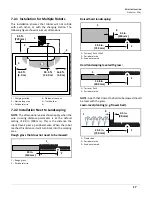
Obstacles Near the Boundary of the Working
Area
If an obstacle is less than 3.3 ft. (1.0 m) from the
boundary of the working area, install the peripheral
wire around the obstacle. If the distance between the
obstacle and the boundary is greater than 3.3 ft.
(1.0 m), but less than 16.4 ft. (5.0 m), install a
pseudo-island.
1 – Peripheral wire
2 – Charging station
1 – Obstacle
2 – Peripheral wire
A
B
2
2
1
1
хϱ͘ϱŌ͘
(>1.5 m)
хϰϵ͘ϬŌ͘
(>15.0 m)
хϰϵ͘ϬŌ͘
(>15.0 m)
1
2
ϯ͘ϱŌ͘
(1.0 m)







































































