




























O
PERATIONAL
S
TATES
A
UTONOMOUS
M
ISSION
S
TATE
13
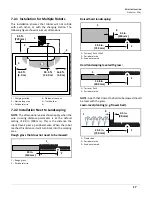
Single Field With Station Loop
•
at Point A the robot moves towards the periph-
eral wire
•
at Point B it follows the track border and begins
to return to the charging station
•
at Point C it follows the station loop wire until it
docks at the charging station
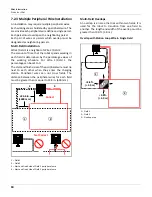
Two Fields With Station Loop
•
at Point A, the robot begins to return to the
charging station
•
at Point B it begins to follow the Field 2 track
border
•
at Point C it follows the Field 1 track border
•
at Point D it follows the station loop wire until it
docks at the charging station
6.1.4 Charge Mode
This mode instructs the robot to dock and remain in the
charging station until the battery is fully charged.
The next operations depend on programming and
external conditions.
The robot will remain at the charging station if:
•
rest periods have been scheduled
•
it has been programmed to stay in the station
•
the outside temperature is too low
The robot will remain at the charging station once the
battery has been charged until:
•
the normal program needs to commence
•
a specific command is issued
1 – Peripheral wire
B
A
C
1
1 – Field 2 peripheral wire
2 – Field 2 track border
3 – Field 1 track border
D
B
A
C
1
3
2







































































