





























PMAC Quick Reference Guide
Introduction
9
VME Mailbox Processing
Reading or writing a block of up to sixteen characters through the VME mailbox registers is the fourth
highest priority in PMAC. The host controls the rate at which this happens. This never takes a significant
portion of PMAC’s computational power.
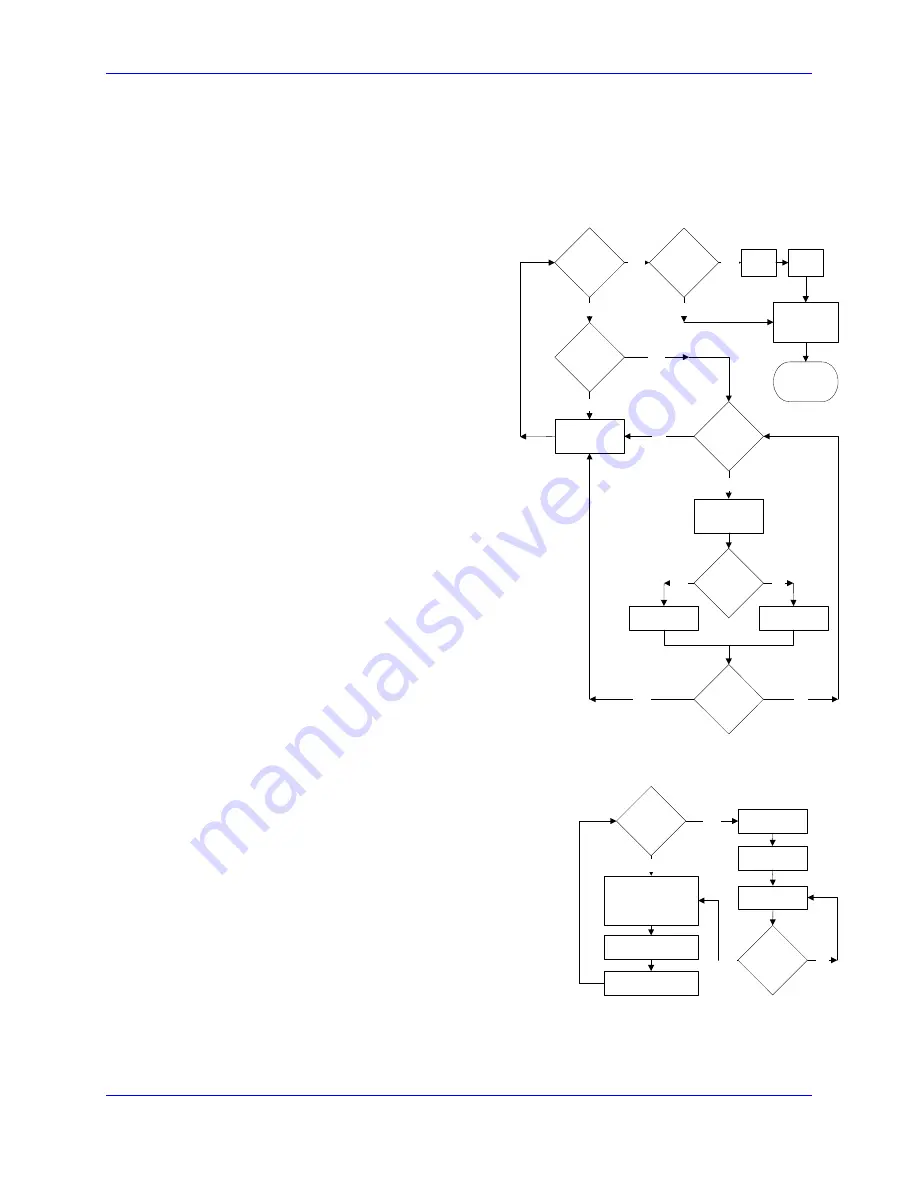
Real-Time Interrupt Tasks
The real-time interrupt (RTI) tasks are the fifth highest
priority on PMAC. They occur immediate after the servo
update tasks at a rate controlled by parameter I8 (every
I8+1 servo update cycles). There are two significant tasks
occurring at this priority level: PLC 0 / PLCC0 and
motion program move planning.
PMAC will scan the lines of each program running in the
different coordinate systems and will calculate the
necessary number of move commands.
The number of move commands of pre-calculation can
either be zero, one or two and depending on the type of
motion commands and the mode in which the program is
being executed.
Non-move commands are executed immediately as they
are found. The scan of any given motion program will
stop as the necessary number of moves is calculated. It
resumes when previous move commands are completed
and more move-planning calculations are required.
In the execution of a motion program, if PMAC finds two
jumps backward (toward the top) in the program while
looking for the next move command, PMAC will pause
execution of the program and not try to blend the moves
together. It will go on to other tasks and resume
execution of the motion program on a later scan. Two
statements can cause such a jump back:
ENDWHILE
and
GOTO
(
RETURN
does not count).
Enabled
PLC0
Enabled
PLCC0
move
calculations
needed?
Read next line of
the motion program
line
contains move
commands?
calculate move
execute line
end of program?
C.S.
program
running?
Next coordinate
system
Yes
No
Yes
No
Yes
No
Yes
No
All
C.S.
programs
checked?
No
Yes
End of Interrupt
I5=1 or I5=3?
Yes
decrement the
watchdog register
by 8
No
Background Tasks
In the time not taken by any of the higher-priority tasks, PMAC
will be executing background tasks. There are three basic
background tasks: command processing, PLC programs 1-31,
and housekeeping. The frequency of these background tasks is
controlled by the computational load on PMAC: the more high-
priority tasks are executed, the slower the background tasks will
cycle through; and the more background tasks there are, the
slower they will cycle through.
Each PLC program executes one scan (to the end or to an
ENDWHILE
statement) uninterrupted by any other background
task (although it can be interrupted by higher priority tasks). In
between each PLC program, PMAC will do its general
housekeeping, and respond to a host command, if any.
Execute next
enabled PLC
Execute first
enabled PLCC
All PLCCs
checked?
Execute next
enabled PLCC
perform safety checks:
end of travel limits
amplifier faults
following error
sets watchdog register
to 4095
command response
(communications)
I5=2 or I5=3?
Yes
No
No
Yes
Summary of Contents for PMAC Mini
Page 4: ......
Page 8: ...PMAC Quick Reference Guide iv Table of Contents ...
Page 28: ...PMAC Quick Reference Guide 20 PMAC Executive Program PEWIN ...
Page 80: ...PMAC Quick Reference Guide 72 Troubleshooting ...
Page 82: ...PMAC Quick Reference Guide 74 Appendix A PMAC Error Code Summary ...
Page 88: ...PMAC Quick Reference Guide 80 Appendix B PMAC I Variables Summary ...
Page 106: ...PMAC Quick Reference Guide 98 Appendix F I O Suggested M Variable Definitions ...







































































