

























7 Diagnostics
7.1 Troubleshooting
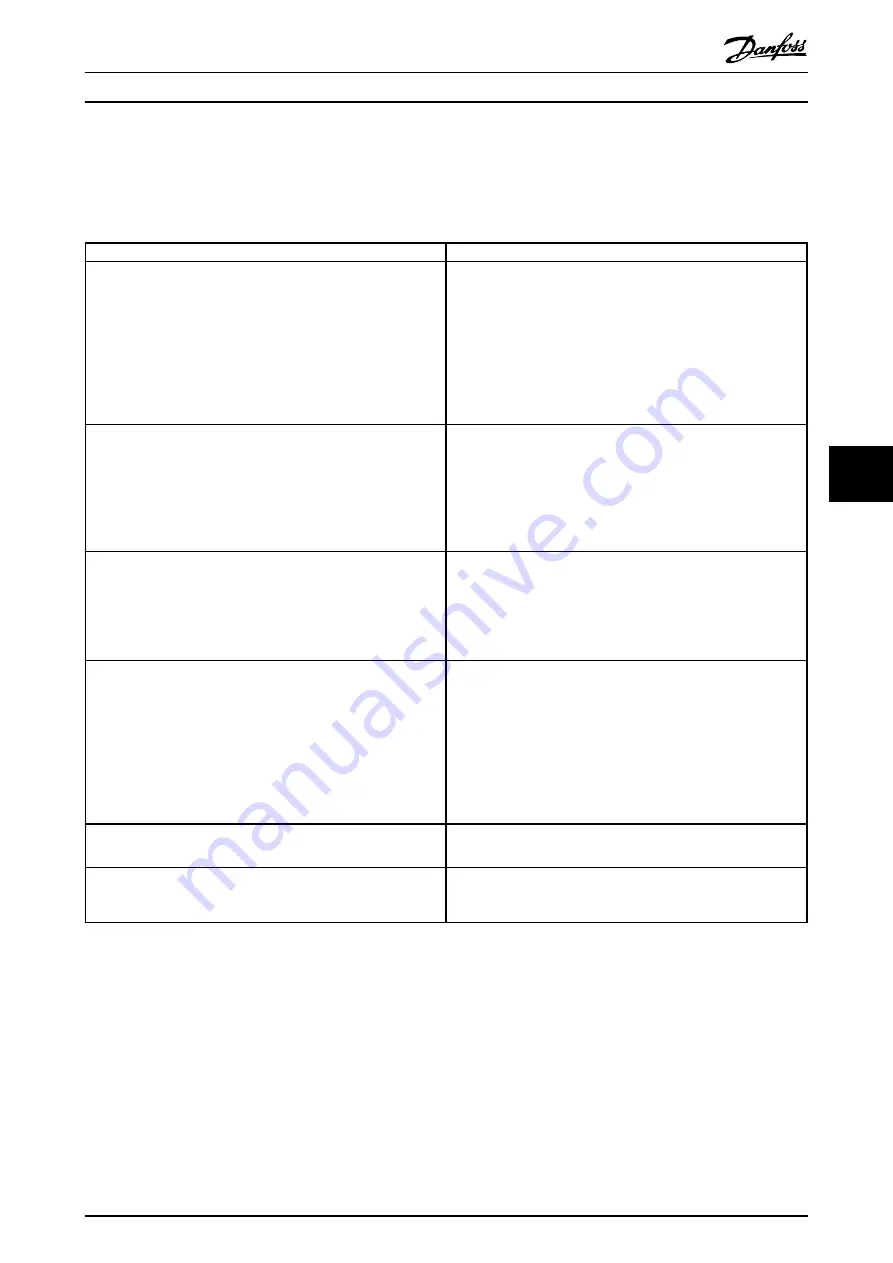
Problem
Solution
When a
PID tracking error too big
error (
19-93 Error Status
) occurs,
the inverter also trips on ALARM 13 (overcurrent)
•
Check the velocity setting.
•
Check encoder for correct rotation direction.
•
Check encoder wiring and parameter configuration.
•
Check for correct brake handling.
•
Check velocity limits.
•
The time set in parameter
3-81 Quick Stop Ramp Time
is too
short. Increase the setting.
Parameter
32-80 Maximum Velocity (Encoder)
needs adjusting.
Increase the setting in parameter
3-03 Maximum Reference
. Doing
this also affects the performance of the parameters
32-60 Propor-
tional Factor
to
32-66 Acceleration Feed-Forward
.
Smaller changes to
parameter 3-03 Maximum Reference
may not
have any noticeable effect on most of these parameters but
32-65
Velocity Feed-Forward
should always be recalculated using the auto-
calculation function
19-19 FFVEL Auto-calculation
.
The frequency converter frequently trips on ALARM 7 (DC
Overvoltage) while ramping down.
•
Use a higher ramp time setting in parameter
19-17 Jog Ramp
Time
for jogging and parameter
19-26 Index Ramp Down Time
for
positioning.
•
Check
PCD [6] Quickbus Target Deceleration
.
•
If a lower ramp time is required, install a brake resistor.
The frequency converter frequently trips on ALARM 13 (overcurrent)
while ramping up.
•
The ramp settings require too much torque. Determine which
operation (manual move or positioning) caused the trip, and
then set the corresponding ramp time (parameter
19-17 Jog
Ramp Time
for jogging and parameter
19-25 Index Ramp Up Time
for positioning) with a higher ramp time setting.
•
Check
PCD [5] Quickbus Target Acceleration
.
•
The PID controller may be unstable – optimise the PID controller
parameters.
The correct target position is reached, but the
PID tracking error
(parameter
34-56 Track Error
) is too big while the motor is turning.
•
Harder settings of the PID controller may be required – optimise
the PID controller parameters.
The option sometimes forgets changes to trajectory data after a
power cycle.
Changes to trajectory data values are not saved after power-down
unless parameter
19-29 Parameter Save
is activated before power-
down.
Table 7.1 Troubleshooting
Diagnostics
Operating Instructions
MG33R302
Danfoss A/S © 04/2014 All rights reserved.
45
7
7







































































