



























X62
X55
X56
X57
X58
X59
2
X60
130BB794.10
1
1
Terminal block 1
2
Terminal block 2
X55
Encoder 2
X56
Encoder 1
X57
Digital inputs
X58
24 V DC supply
X59
Digital outputs
X60
MCO CAN Bus
X62
Debug connections (RS 485)
Illustration 4.3 Location of Terminal Blocks 1 and 2
Use terminal block 1 with bookstyle and terminal block 2
with compact.
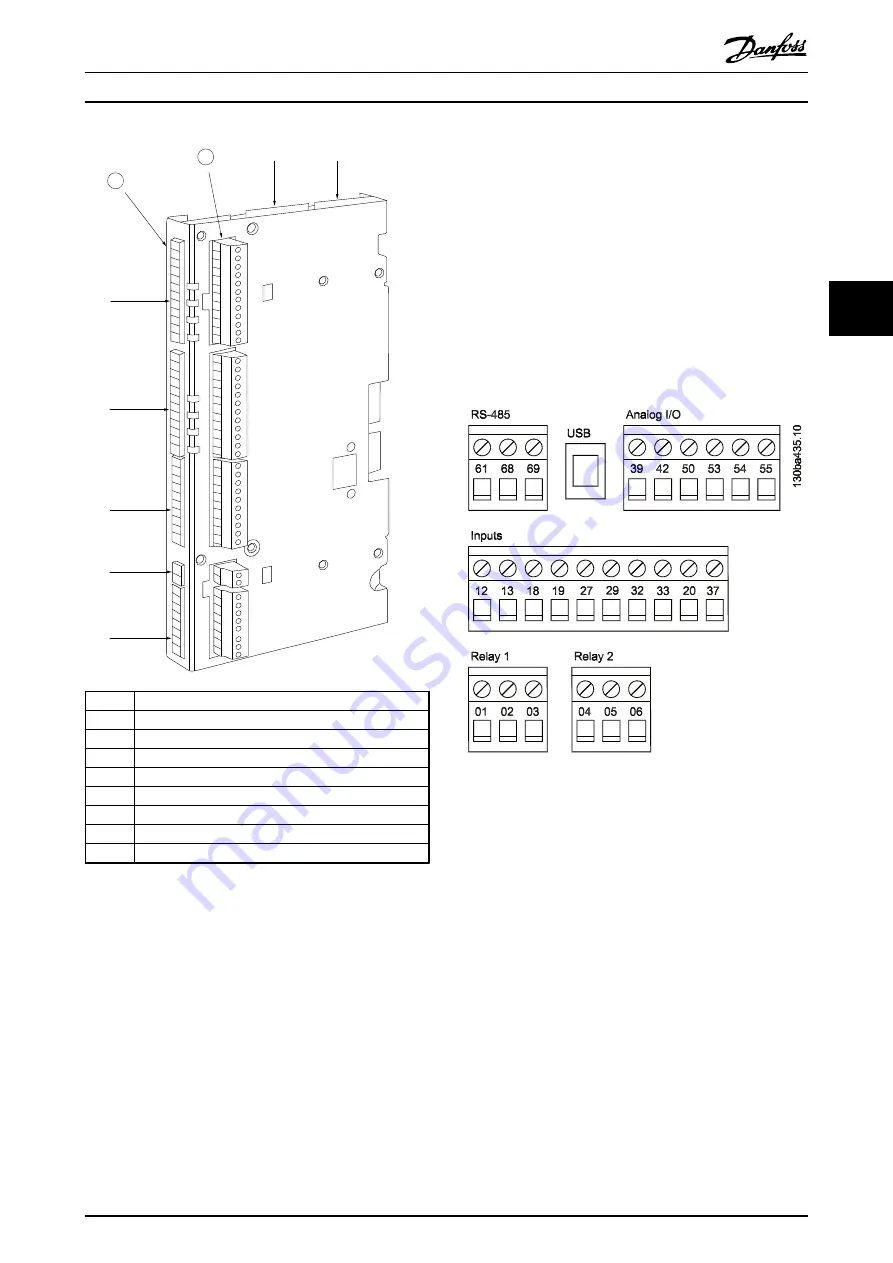
4.2 Frequency Converter Control Card
Terminals
The terminals on the VLT
®
AutomationDrive control card
are allocated for the MCO 351.
Do not change the following parameters for I/O settings:
•
Parameters
5-10
to
5-15
set to
[0] No operation
(default setting)
•
Parameters
3-15
,
3-16
and
3-17
set to
[0] No
function
(default setting)
•
Parameter
6-50
set to
[52] MCO 0–20 mA
Illustration 4.4 FC 300 Terminals
Technical data on these terminals can be found in the
VLT
®
AutomationDrive FC 301/FC 302 Design Guide
.
Electrical Installation
Operating Instructions
MG33R302
Danfoss A/S © 04/2014 All rights reserved.
11
4
4