





























Computec
CDD5.0
EN
CDD 5.0: user manual – Rev.01
Page 45/63
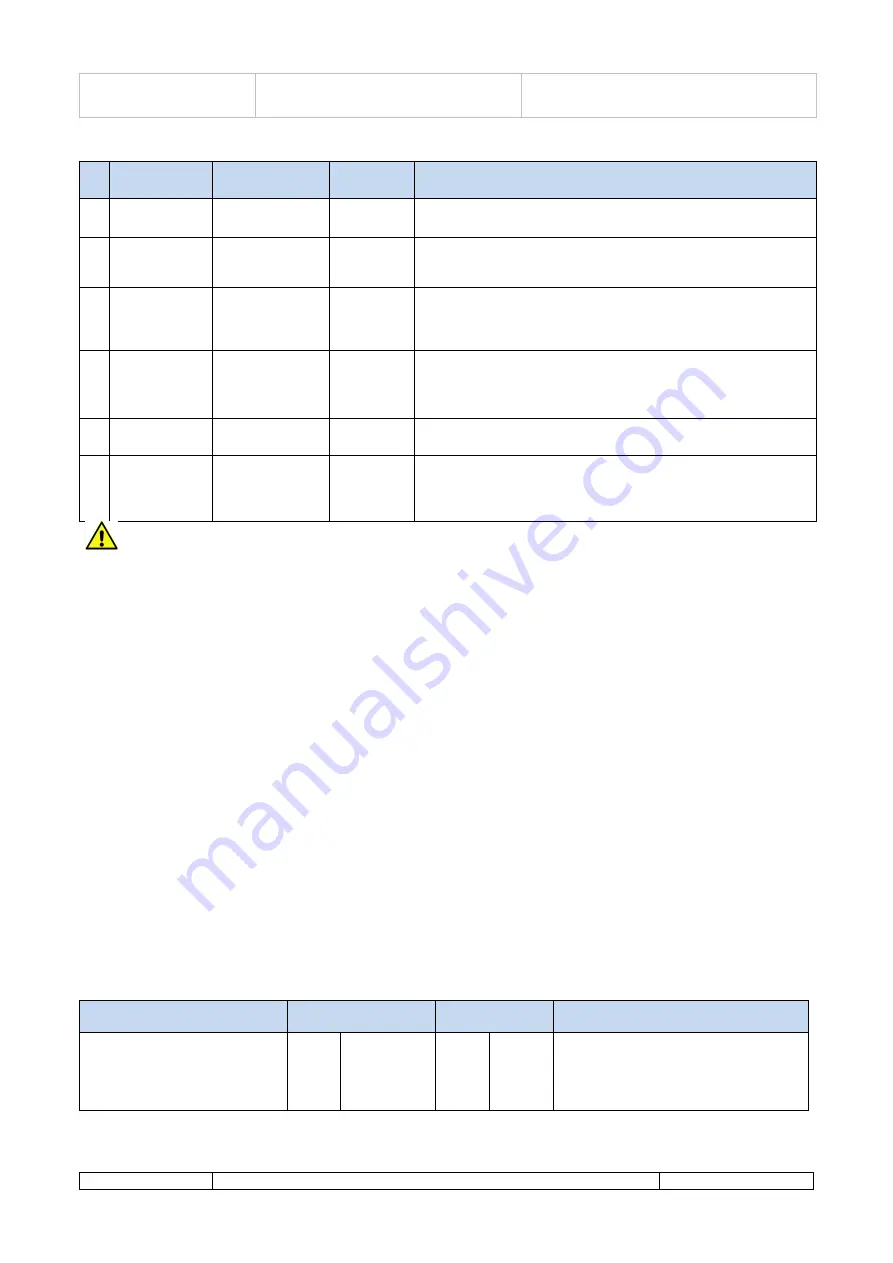
The PSO function activation sequence is reported in the table below:
N.
Phase
MLC signals
CDD5
signals
Notes
1
Closed skate
parking
DCC active
RSC not active
DCS active
Skate closed, parking torque applied to the motor
2
Delay to open
skate
DCC not active
RSC not active
DCS active
Door drive waits for PSO activation delay expiration.
If during this phase DCC is activated the door drive returns to phase 1
3
Skate opening
DCC not active
RSC not active
DCS active
The door drive opens the skate until the position defined by
parameter “PSO skate opening space”.
If in this phase DCC is activated the controller goes to phase 5
4
Parking with
opened skate
DCC not active
RSC not active
DCS active
The door drive is in active PSO, with opened skate and panels closed;
the position control is set according to the related parameter “PSO
position control”.
If in this phase DCC is activated the door drive goes to phase 5
5
Skate closing
DCC active
RSC not active
DCS active
The door drive closed the skate, because of DCC active
6
DCS
deactivation
DCC not active
RSC not active
DCS not
active
If an external force moves the panels in opening direction to a
position higher than “PSO position error”, the controller removes the
DCS output and returns to wait for a MLC command.
: if in any phase of this sequence the MLC activates the DOC command, the door begins immediately the
requested opening movement, starting from the current door position.
5.7.2
PC44: Door closed Reduced torque relaxing tolerance
The door closed and skate closed parking management is composed by two phases (in case PSO function is
not active):
1.
Parking with maximum parking torque
a.
The controller applies the maximum parking current to the motor, as defined by the
“maximum parking current” parameter for the closing profile
2.
Parking with reduced torque
a.
If there are no commutation in the DCC (or RSC if P99=0) signals, after a programmable
delay defined by parameter PC45, the controller applies a gradual relaxing of the belt, to
reduce the torque applied to the motor, without relaxing the belt position over a pre-
defined threshold (PC44). In case this threshold is passed, the controller proceeds to the
position recovering, and then restarts the delay counting.
This parameter allows to program the maximum relaxing threshold acceptable during door closed parking
phase, with reduced torque.
Parameter PC44
Range
Default value
Description
Reduced torque parking
relaxing tolerance
S20
S90
S120
[ 1 ; 5]mm
[ 1 ; 20]mm
[ 5 ; 20]mm
S20
S90
S120
2mm
7mm
7mm
Maximum relaxing acceptable during
CL parking with reduced torque